
Department of Computer Science
Technical University of Cluj-Napoca
Introduction to Artificial Intelligence
Adrian Groza, Radu Razvan Slavescu and Anca Marginean
UTPRESS
Cluj-Napoca, 2018
ISBN 978-606-737-290-8
Contents
1 Problem-solving agents 5
1.1 Python programming language . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Pac-Man framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Uninformed search 10
2.1 Let’s find the food-dot. Search problem . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Random search agent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Tree seach and graph search . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Depth first, breadth first and uniform costs search strategies . . . . . . . . . . . 13
2.5 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Informed search 19
3.1 A* algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Admissible and consistent heuristics . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Finding all corners. Eating all food . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Adversarial search 24
4.1 Reflex agent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Minimax algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Alpha-beta prunning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5 Propositional logic 31
5.1 Getting started with Prover9 and Mace4 . . . . . . . . . . . . . . . . . . . . . . 31
5.2 First example: Socrates is mortal . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3 A more complex example: FDR goes to war . . . . . . . . . . . . . . . . . . . . 34
5.4 Wumpus world in Propositional Logic . . . . . . . . . . . . . . . . . . . . . . . . 35
5.5 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Models in propositional logic 38
6.1 Formalizing puzzles: Princesses and tigers . . . . . . . . . . . . . . . . . . . . . 38
6.2 Finding more models: graph coloring . . . . . . . . . . . . . . . . . . . . . . . . 41
6.3 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7 First Order Logic 46
7.1 First Example: Socrates in First Order Logic . . . . . . . . . . . . . . . . . . . . 46
7.2 FDR goes to war in FOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.3 Alligator and Beer: finding models in FOL . . . . . . . . . . . . . . . . . . . . . 50
7.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2
8 Inference in First-Order Logic 53
8.1 Revisiting resolution and skolemization . . . . . . . . . . . . . . . . . . . . . . . 53
8.2 Paramodulation and demodulation . . . . . . . . . . . . . . . . . . . . . . . . . 54
8.3 Let’s find the Wumpus! . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
9 Constraint satisfaction problems 60
9.1 Solving CSP by consistency checking . . . . . . . . . . . . . . . . . . . . . . . . 60
9.2 Solving CSP with stochastic local search . . . . . . . . . . . . . . . . . . . . . . 63
9.3 Solving CSP with satisfiability solvers . . . . . . . . . . . . . . . . . . . . . . . . 65
9.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
10 Classical planning 71
10.1 Planning domains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
10.2 Planning Domain Definition Language . . . . . . . . . . . . . . . . . . . . . . . 74
10.3 Fast Downward planner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
10.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
11 Heuristics for planning 79
11.1 Defining heuristics by relaxation . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
11.2 Search engines and heuristics in the Fast Downward planner . . . . . . . . . . . 81
11.3 Introducing costs to actions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
11.4 Modelling planning domains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
11.5 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
12 Planning and acting in the real world 89
12.1 Planning domains with uncertainty . . . . . . . . . . . . . . . . . . . . . . . . . 89
12.2 Conformant planning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
12.3 Contingent planning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
12.4 Solution to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
13 Knowledge representation with event calculus 95
13.1 Discrete Event Calculus reasoner . . . . . . . . . . . . . . . . . . . . . . . . . . 95
13.2 Reasoning modes in event calculus . . . . . . . . . . . . . . . . . . . . . . . . . 96
13.3 Carying a newspaper example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
13.4 Solutions to exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
A Brief synopsis of Linux 100
B L
A
T
E
X– let’s roll! 109
C Fast and furios tutorial on Python 112
3
Introduction
This tutorial follows the structure of the AIMA textbook. The tutorial proposes exercises for
the first twelve chapters of the textbook and has three parts.
The first part deals with agents that solve problems by searching. Uninformed search
strategies (depth first search, breadth first search, uniform cost search) are compared against
informed search strategies (A* algorithm). The strength of A* algorithm is evidentiated through
various admissible and consistent heuristics. The search strategies are presented through a
game-based framework, that is the Pacman agent. The Pacman game allows students to also
practice adversarial search. This part relies on the search tutorial used at Berkeley http:
//ai.berkeley.edu/project_overview.html. The programming language for this part is
Python, as this language has currently rised as the main platform for artificial intelligence.
The second part focuses on knowledge representation based on propositional and first order
logic. Prover9 theorem prover and Mace4 satisfiability tool are used to illustrate concepts
like: resolution, unsatisfiability, models, or conjuctive normal form. The chapter presenting
constraint satisfaction problems allows students to trace local search algorithms: random walk,
hill climbing, stochastic hill climbing, greedy descendent with random restarts or simmulating
annealling.
The third part deals with planning agents. The Fast Downward planning system is used to
solve classical planning problems. To role of heuristics in planning is stressed through various
experiments and running scenarios. We also consider partial observability and nondeterminism.
To handle these, we need conformant planning. Moreover, ability to observe aspects of the
current state is handled by contingent planning.
The proposed exercises are rather ambitious. Some exercises are straitforward, but others
are open toward stimulating research in the eager students. The rationale was to accomodate
the heterogenity of the learners. Focus is both on programming and on modelling the reality
into a formal representation. Students should be aware that computing interacts with many
different domains. Solutions to many artificial intelligence tasks require both computing skills
and domain knowledge. This laboratory best serves as a test to see whether you have at the
moment the potential to propose solutions to realistic scenarios and validate your solutions
with a running prototype. The assignments are designed to provide you with an insight of
the research methodology by developing your critical thinking, enhancing your ability to work
independently and develop your technical writing. Side effects of completing this tutorial
include the pleasure of discovering the strength of Linux for scientific experiments and also the
most powerful framework for scientific editing, that is Latex.
Chapters 1-4 and the appendix on Python are written by Anca Marginean. Chapters 5-8
and the appendix on Linux and LaTex are written by Radu Razvan Slavescu. Chapter 9 is a
joint work between Radu Razvan Slavescu and Adrian Groza. Chapters 10-13 are written by
Adrian Groza.
4

Chapter 1
Problem-solving agents
Learning objectives for this week are:
1. To get used to or recall Python programming language
2. To run Pacman framework
1.1 Python programming language
The first four laboratory works use a framework developed in Python. You need basic skills of
writing Python. Anexa C is a brief overview of the main elements you will use. Either you are
a Python guru, or a Python beginner, read it and do the exercises.
1.2 Pac-Man framework
The Pac-Man projects were developed for UC Berkeley’s introductory artificial intelligence
course. They were released to other universities for education use http://ai.berkeley.edu/
project_overview.html. Search, Adversarial search, Reinforcement learning, Probabilistic
inference with hidden Markov model, Machine learning with Naive Bayes or Perceptron are
some AI techniques applied in the projects. During this semester you will study the first two.
Pac-man is a game with more entities: Pacman, ghosts, food-dots and power-pellets. The
player controls Pacman in its quest of eating all the food-dots. Pacman dies if it eaten by a
ghost, but if Pacman eats a power-pellet, it wil have temporary ability to eat also the ghosts.
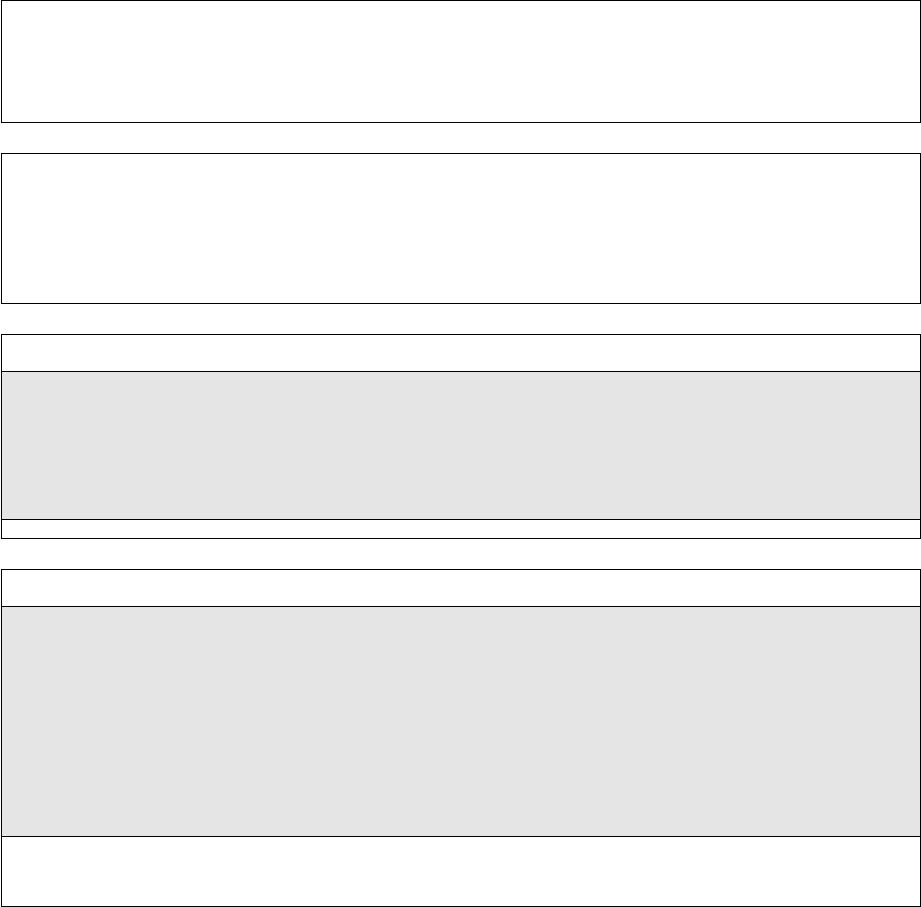
Our aim is to build agents that control Pacman and win. Possible actions are North, South,
East, West, Stop, depending on the presence of walls (see figure 1.1). With each step, Pacman
looses 1 point, at each food-dot eaten it gets 10 points, on finishing the game it get 500 points.
Figure 1.1: Legal actions for Pacman when there is a wall
1 2 3 4
x
1
2
3
y
P
North
EastWest
Legal actions
5

Figure 1.2: Run configuration for: python pacman.py -l smallMaze -p SearchAgent
For the study of search problems and agents a simpler version of Pacman is used where the
ghosts are not present. Download the code from https://s3-us-west-2.amazonaws.com/
cs188websitecontent/projects/release/search/v1/001/search.zip and extract it into
your own folder.
You can play a game of Pacman by running the script pacman.py:
1 python pacman . py
You can see the available options for the script pacman.py with:
1 python pacman . py -h
The layout must be specified with option −l or − − layout. The agent is specified with
−p or − − pacman. The layouts are defined in the Layout folder. The agents are defined in
searchAgents.py file.
Using PyCharm
You can use any text editor for editing the files, or if you prefer working in an IDE, you can
use Pycharm.
Possible steps in using PyCharm:
1. Start PyCharm and create a new project with the location in the folder search and with
python 2.7 as project interpreter.
2. Run pacman.py: Right click on pacman.py and run. This will create a default Run
Configuration. You can run the current configuration with SHIFT+F10.
3. You can change or add new Run configurations from the menu Run >> Edit configurations
or from the Select Run Configuration drop-down list in the right upper corner (see figure
1.2).
1 $ pycharm . sh
2 File >> New Project > > Pure Python
3 < choose search folder from your own folder for Location >
4 < select Python 2.7 for Interpreter >
5
6 Run >> Edit Conf igu rat ion s >> + >> Choose Python >> Edit the
param eter s : Script , Script parameters , and Working direc tory
6

Figure 1.3: Types of search agents from SearchAgens.py.
There are more alternative running ways for Pacman: from a terminal outside PyCharm,
from Pycharm terminal, or with Pycharm Run configurations. In order to open Pycharm
terminal use ALT+F12 or go the bottom-left corner of PyCharm window. For all exercises, the
script is pacman.py, but the parameters will be different, mainly for the layout and the agent.
Since you will run pacman with more options, you should create a Run Configuration for each
combination. The file commands.txt from search folder contains a list of the most common
commands.
Content of search folder
In the extracted folder search there are more files. Each file, class or method includes comments
which are very important for you, mainly for classes or methods which are to be changed. You
have to change only in the special are marked with YOUR CODE HERE.
• Files to be changed
– search.py - description of an abstract class SearchProblem and several functions
where you are supposed to add your code. The main methods of SearchProblem
class are:
∗ getStartState(self) - it returns the initial state
∗ isGoalState(self, state) - it checks whether a state is a goal state and
returns true or false
∗ getSuccessors(self, state) - it takes a state and returns a list of legal suc-
cessors together with the requires actions and cost.
∗ getCostOfActions(self, actions) - it takes a sequence of actions and returns
its cost.
– searchAgents.py - includes the search-based agents, already implemented or ToBe
implemented search problems, and heuristics.
∗ search problem: There are two classes derived from SearchProblem:
· PositionSearchProblem - a search problem in which Pacman needs to find
a certain position or positions. Class AnyFoodSearchProblem is derived
from this and describes the problem of finding all the food.
· CornersProblem - a search problem in which Pacman needs to find all the
corners.
7

∗ agents: There are two important agents defined, a SearchAgent with more
derived classes (figure 1.3), and a very simple reflex agent GoWestAgent.
• Files which include worth reading parts
– pacman.py - the main file for running Pacman games. Read the description of
GameState type which specifies the full game state.
– game.py - the logic behind how the Pacman world works. Important types: AgentState,
Agent, Direction, Grid.
– util.py - data structures which are recommended to be used when implementing
the search algorithms
In order to better understand the structure of the project, you can create class diagrams in
PyCharm (Right click on a file >> Diagrams). Do not forget, you will most likely change only
the files search.py and searchAgents.py.
Exercise 1.1 Analyze the implementation of GoWestAgent from searchAgents.py and run
the agent with the following commands:
1 python pacman . py -l testMaze -p GoWes tAge nt
2 python pacman . py -l tinyMaze -p GoWes tAge nt
Run them from: i) PyCharm terminal; ii) PyCharm Run configuration; iii) system’s terminal.
Does Pacman reach the food from (1,1) for both layouts? Why?
Exercise 1.2 Watch some movies with Pacman helped by search algorithm. At the end of the
first four labs you will be able to solve similar problems.
• Why do we need search? http: // cs-gw. utcluj. ro/
~
anca/ iia/ why_ search. ogv ,
• Different layouts solved with different search algorithms http: // cs-gw. utcluj. ro/
~
anca/ iia/ examples. ogv ,
• Comparison of more strategies on the same layout http: // cs-gw. utcluj. ro/
~
anca/
iia/ comparison_ search_ strategies. ogv ,
• pacman and more ghosts http: // cs-gw. utcluj. ro/
~
anca/ iia/ multipacman. ogv .
8


Chapter 2
Uninformed search
This lab will introduce search algorithm and search strategies for problem-solving agents. You
will implement them in Pac-Man framework and apply them for a Position Search problem:
helping Pac-Man find a certain foot-dot. Before dwelving into this, you will do some exercises
to get familiar with Pac-Man framework.
Learning objectives for this week are:
1. Understand agents that solve problems by searching
2. Understand tree search and graph search
3. Develop uniformed search strategies: depth-first search, breadth-first search, uni-
form cost
2.1 Let’s find the food-dot. Search problem
In the first problem Pac-Man needs to find a certain food dot. It is known the initial Pac-Man
position and the position of the food-dot. The only possible actions for Pac-Man are going
North, South, East, or West.
The solution to this problem is a sequence of actions on Pacman board. The cost of the
solution is the total sum of actions’ cost. Positions (x, y) determine the state space. The layouts
described in the folder layout mention the initial Pac-Man position, the food-dot position and
walls.
Open search.py and read tinyMazeSearch function. Run the command
1 python pacman . py -l tinyMaze -p Searc hAge nt -a fn = tinyM aze Sea rch --
frameTime =1
or add a new configuration with corresponding arguments. If you want to slow down the
movement of Pac-Man, use the option frametime.
Exercise 2.1 Read the output of your previous command. How many nodes were expanded?
Which is the total cost of the found solution?
Exercise 2.2 Why the agent finds the dot? Change the maze (with another one from layouts
folder). Does it work? Does the Pacman find the food?
The problem is completely formalized in the class PositionSearchProblem from search-
Agents.py. Conceptually it is a search problem, therefore its class extends the class Search-
10

Problem. Search-based agents are able to solve search problems, meaning they are able to
compute sequences of actions for a certain layout. The most important advantage of using search
problems and search-based agents is that the agents are problem-independent. Therefore, the
same agent can solve Pacman food problem, but also eight-puzzle problem, once the problems
are modelled as search problems.
A search problem can be defined by:
• initial state
• possible actions
• transition model: Result(s,a). A successor state is a state reachable from a given state
by a single actions.
• goal test: it is true only in goal states.
• path cost
All the search problems from Pac-Man project are described in these terms. For food-dot
problem, the initial state is the initial Pacman position. Possible actions are North, South,
East, West, where for each action it is described the new position (x
0
, y
0
) reached after doing
the action from (x, y). The goal test returns true when Pacman is in the same position with
the food-dot. In the default problem, each action’s cost is 1, therefore the path’s cost is equal
to the number of actions. The solution to a search problem is a sequence of actions which if
executed from the initial state, reaches a goal state.
Exercise 2.3 Read from AIMA what are and how to formalize Search problems in sections
3.1.1 and 3.1.2.
2.2 Random search agent
The final aim of this laboratory work is to solve Pacman food problem, but before that, you
will do some exercises which help you understand the structure of the code which is relevant
for you.
Exercise 2.4 Open searchAgents.py and go to the class PositionSearchProblem. Read the
comments. Identify the main elements of a search problem: initial state, goal test, successor
and cost of actions. Identify the order in which the legal actions are returned in getSuccessors
method.
Exercise 2.5 Go to depthF irstSearch function from search.py and uncomment the existing
lines:
1 print " Start : " , problem . getStartS tat e ()
2 print " Is the start a goal ?" , problem . isGoalState ( problem .
getS tar tSt ate () )
3 print " Start ’s su cces sors : " , problem . get Suc ces sors ( problem .
getS tar tSt ate () )
Run again
1 python pacman . py -l smallMaze -p SearchAg ent
11

Figure 2.1: Initial position of Pacman in smallMaze layout
1 Start : (11 , 6)
2 Is the start a goal ? False
3 Start ’s suc cess ors : [((11 , 7) , ’North ’, 1) , ((12 , 6) , ’ East ’, 1) ,
((10 , 6) , ’West ’, 1) ]
The initial position is (11,6) and it is not a goal state (figure 2.1). problem.getSuccessors(
problem.getStartState() ) returns a list of three tuples, one for each legal action. Each tuple
contains the next state, the action and the action’s cost. Only three actions are legal due to
the fact that there is wall on south.
Exercise 2.6 Go to depthF irstSearch function from search.py. Get the succesors of the
initial state and print the state, the action and the cost for each successor. Run again with
smallMaze.
Exercise 2.7 Go to depthF irstSearch function from search.py. Comment the code from the
previous exercises. Comment util.raiseNotDefined() and similar to TinyMazeSearch, add to
depthFirstSearch function:
1 from game import Di rections
2 w = Directions . WEST
3 return [w , w ]
Run again
1 python pacman . py -l smallMaze -p SearchAg ent
Important: each search function must return a list of legal actions. Otherwise, you will get an
error.
Exercise 2.8 Go to depthF irstSearch function from search.py. Return a sequence of two
legal actions from the initial state.
Exercise 2.9 Go to depthF irstSearch function from search.py. Create a new data-structure
with two components: name and cost. Create two instances of the new data structure and add
them to a Stack described in util.py. Pop an element from the stack and print it.
Exercise 2.10 Random search agent. As a baseline, we will create an agent which searches
a solution randomly: it just picks one legal action at each step of search. Write a new search
function in search.py similar to tinyMazeSearch function. The function returns a list of
actions from the initial state to goal state, each action being randomly selected from the set of
legal actions.
12

2.3 Tree seach and graph search
The general algorithms for solving search problems [23] are described in the following listings:
1 function TREE - SEARCH ( problem ) returns a solution , or failure
2 in itialize the frontier using the initial state of problem
3
4 loop do
5 if the fron tier is empty then return failure
6 choose a leaf node and remove it from the frontier
7 if the node contain s a goal state
8 then return the corr esp onding sol ution
9 expand the chosen node , adding the resulting nodes to the frontier
1 function GRAPH - SEARCH ( problem ) returns a solution , or failure
2 init iali ze the frontier using the initial state of problem
3 init iali ze the explored set to be empty
4
5 loop do
6 if the fron tier is empty then return failure
7 choose a leaf node and remove it from the frontier
8 if the node contain s a goal state
9 then return the corr esp onding sol ution
10 add the node to the explor ed set
11 expand the chosen node , adding the resulting nodes to the frontier
only if not in the fron tier or e xplored set
We recommend using of the following structure for nodes ([23]) in tree/graph search algo-
rithm:
• state: the state in the state space to which the node corresponds;
• parent: the node in the search tree that generated this node;
• action: the action that was applied to the parent to generate the node;
• path-cost: the cost of the path from the initial state to the node
Exercise 2.11 Read from AIMA section 3.3. about Tree search and Graph search as general
methods for searching for solutions.
The strategies for choosing the node to be extended strongly influences the length of the
solution, the time and space required for searching. You must implement three uninformed
search strategies and compare their application on Pacman food-dot problem.
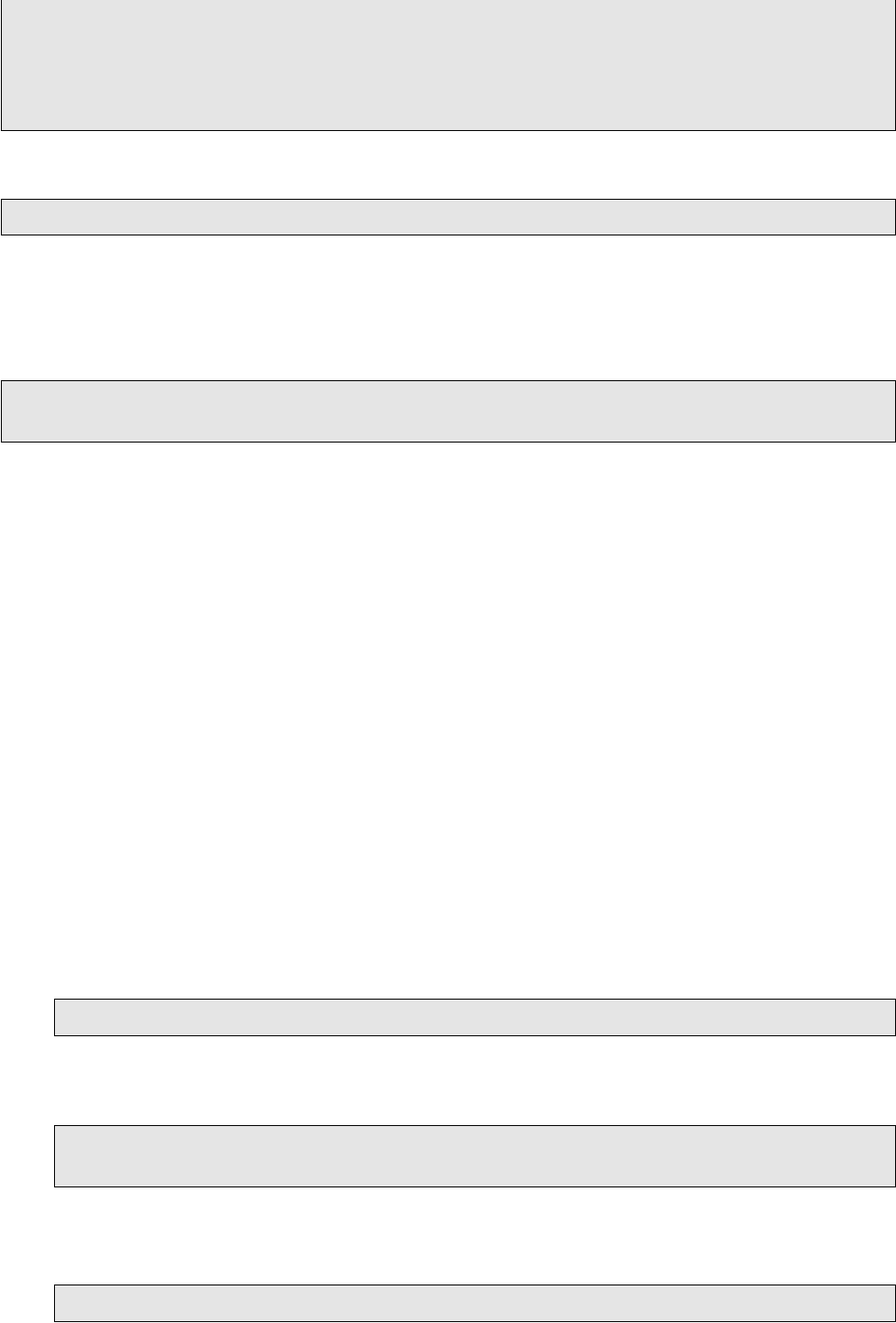
2.4 Depth first, breadth first and uniform costs search
strategies
Depth-first search is a tree/graph-search with the frontier as LIFO (stack). Breadth-first search
is a tree/graph-search with the frontier as FIFO (queue). Uniform cost search is a search with
the frontier as a priority queue, meaning that it expands the node with the lowest path cost
g(n).
13

1 2 3
x
1
2
3
y
123
4 5 6
7
Expanded states
1 2 3
x
1
2
3
y
Solution
Nodes added Extracted
to the frontier node from
frontier
(3, 3)
(3, 3)→(3, 2)(South)
(3, 3)→(2, 3)(West)
(2, 3)
(2, 3)→(2, 2)(South)
(2, 3)→(1, 3)(West)
(1, 3)
(1, 3)→(1, 2)(South)
(1, 2)
(1, 2)→(1, 1)(South)
(1, 2)→(2, 2)(East)
(2, 2)
(2, 2)→(3, 2)(East)
(3, 2)
(3, 2)→(3, 1)(South)
(3, 1)
No succesors which
were not already expanded
GOAL (1, 1)
Solution: West, West, South, South
1 2 3
x
1
2
3
y
123
4 5 6
789
Expanded states
1 2 3
x
1
2
3
y
Solution
Nodes added to Extracted
the frontier node from
frontier
(3, 3)
(3, 3)→(3, 2)(South)
(3, 3)→(2, 3)(West)
(2, 3)
(2, 3)→(2, 2)(South)
(2, 3)→(1, 3)(West)
(1, 3)
(1, 3)→(1, 2)(South)
(1, 2)
(1, 2)→(1, 1)(South)
(1, 2)→(2, 2)(East)
(2, 2)
(2, 2)→(2, 1)(South)
(2, 2)→(3, 2)(East)
(3, 2)
(3, 2)→(3, 1)(South)
(3, 1)
(3, 1)→(2, 1)(West)
(2, 1)
(2, 1)→(1, 1)(West)
GOAL (1, 1)
Solution: West, West, South, East, East,
South, West, West
Figure 2.2: Expanded states and solution for DFS on similar layouts: with/without wall
Exercise 2.12 Read from AIMA about uninformed search strategies: Depth first search (sec-
tion 3.4.3), breadth-first search (section 3.4.1) and uniform cost search (section 3.4.2).
Exercise 2.13 Compare the behavior of DFS on a simple layout of 3x3 with/without a wall in
position (2,1) from figure 2.2. The number on each cell indicate the order in which the positions
are explored, while the arrow indicate the actions from the solution. Think about ways to reduce
the number of expanded states and to improve the quality of the solution.
In case of breadth-first search, the goal test from graph search can be applied to each node
before inserting the element in the frontier rather then when it is extracted from the frontier.
Note that breadth-first search always has the shallowest path to every node on the frontier.
In search.py you can find depthFirstSearch, breadthFirstSearch, and uniformCostSearch
functions. In order to obtain maximum score for the activity of this lab, you need to imple-
ment these three strategies. The first three questions from the autograder check the identified
solution and the order in which the nodes are explored. You need to obtain 9 points for
14

these. Implement them as graph-searches with different types of data-structures for the fron-
tier. it is recommended to use Stack, Queue and PriorityQueue classes implemented in file
util.py. Write your code as general as possible and use methods from the SearchProblem class
getStartState, isGoalState, getSuccessors.
Observation: If you implement DFS as a graph search, there will be minor differences
between the three strategies DFS, BFS and UCS.
Exercise 2.14 Question 1 In search.py, implement Depth-First search (DFS) algorithm
in function depthFirstSearch. Don’t forget that DFS graph search is graph-search with the
frontier as a LIFO queue (Stack).
• Test your solution on more layouts:
python pacman . py -l tinyMaze -p Sea rchAgent
python pacman . py -l m ediu mMaze -p Se arch Agent
python pacman . py -l bigMaze -z .5 -p Se arch Agen t
• Are the solutions found by your DFS optimal? Explain your answer
• Run autograder python autograder.py and check the points for Question 1.
For more details, go to project page http://ai.berkeley.edu/search.html.
Exercise 2.15 Question 2 In search.py, implement Breadth-First search algorithm in
function breadthF irstSearch.
• Similar to DFS, test your code on mediumMaze and bigMaze by using the option −a fn =
bfs
1 python pacman . py -l m ediu mMaze -p Se arch Agent -a fn = bfs
• Is the found solution optimal? Explain your answer.
• Run autograder python autograder.py and check the points for Question 2.
Exercise 2.16 Question 3 In search.py, implement uniform-cost graph search algorithm in
uniformCostSearch function.
• Test it with mediumMaze and bigMaze
1 python pacman . py -l m ediu mMaze -p Se arch Agent -a fn = ucs
• Compare the results to the ones obtained with DFS. Are the solutions different? Is the
number of extended(explored) states smaller? Explain your answer.
• Consider that some positions are more desirable than others. This can be modeled by a cost
function which sets different values for the actions of stepping into positions. Identify in
searchAgents.py the description of agents StayEastSeachAgent and StayW estSearchAgent
and analyze the cost function. Why the cost .5 ∗ ∗x for stepping into (x, y) is associated
to StayW estAgent?
• Run the agents StayEastSeachAgent and StayW estSearchAgent on mediumDottedMaze
and mediumScaryMaze with uniform cost search.
15

1 python pacman . py -l me diu mDott edM aze -p Stay EastS ea rch Ag ent
2 python pacman . py -l me diu mSc ary Maze -p StayW es tSe ar chA ge nt
For more details, go to project page http: // ai. berkeley. edu/ search. html .
• Run autograder python autograder.py and check the points for Question 3.
Don’t forget, a set of commands for running and testing Pacman are included in commands.txt.
Once you implement BFS, you can test it on the eight puzzle problem with python eightpuzzle.py.
16
2.5 Solutions to exercises
Solution for exercise 2.1.
The number of expanded nodes is 0, since the sequence of actions is not computed, it is
hard-coded. The cost of the path is 8, equal with the number of required actions from
the initial position to (1,1).
Solution for exercise 2.2.
Since the sequence of actions is hard-coded, on a new layout most probable you will get
an exception “Illegal action”. For example for smallMaze, Pacman has wall in south of
its initial position, and the first actions from the sequence is South, therefore you get an
exception.
Solution for exercise 2.5.
1 print " Initial state is " , problem . getSt art Sta te ()
2 for succ in problem . ge tSu cce sso rs ( problem . getStartS tat e () ):
3 ( state , action , cost ) = succ
4 print " Next state could be " , state , " with action " , action ,
" and cost " , cost
Solution for exercise 2.8.
1 ( next_state , action , _) = problem . g etS uccessors ( problem .
getStar tSt ate () ) [0]
2 ( next_next , next_action , _) = problem . getSuccessor s ( ne xt_state )
[0]
3 print "A possible solution could start with actions " , action ,
next _act ion
4 return [ action , ne xt_action ]
5 # util . rai seN otDef ine d ()
The last line is commented because we want to see what happens when these two actions
are executed.
17

Solution for exercise 2.9.
1 node1 = Cu stomNode ( " first " , 3) # creates a new object
2 node2 = Cu stomNode ( " second " , 10)
3 print " Create a stack "
4 my_stack = util . Stack () # creates a new object of the class Stack
defined in file util . py
5 print " Push the new node into the stack "
6 my_stack . push ( node1 )
7 my_stack . push ( node2 )
8 print " Pop an element from the stack "
9 extracted = my_stack . pop () # call a method of the object
10 print " Extracted node is " , extracted . getName () ," " , extra cted .
getCost ()
11 util . rais eNo tDe fin ed ()
The class is defined also in search.py
1 class C ustomNode :
2
3 def __init__ ( self , name , cost ):
4 self . name = name # attribute name
5 self . cost = cost # attribute cost
6
7 def getName ( self ):
8 return self . name
9
10 def getCost ( self ):
11 return self . cost
Solution for exercise 2.10.
At each step in the search, the agent asks for the successors of the current state and
chooses one randomly. Remember that each successor is a tuple of state, action, cost.
The state of the chosen successor is the new current state in search, while the action is
added to the solution.
1 def r and omSearc h ( problem ) :
2 current = problem . get Sta rtS tat e ()
3 solut ion =[]
4 while ( not ( problem . isGoalStat e ( current ) )):
5 succ = problem . ge tSu cce sso rs ( current )
6 no_o f_s ucc essor s = len ( succ )
7 rand om_ succ_ index = int ( random . random () * no _of _su ccess ors )
8 next = succ [ random_ succ_ ind ex ]
9 current = next [0]
10 solution . append ( next [1])
11 print " The solution is " , solution
12 return solution
Add rs = randomSearch to the end of search.py and run with option −a fn = rs
1 python pacman . py -l tinyMaze -p Searc hAge nt -a fn = rs
18

Chapter 3
Informed search
What can an agent do when no single action will achieve its goal? SEARCH. Although BFS,
DFS and UCS are able to find solutions, they do not do it efficiently. They are called uninformed
algorithms since they use only problem definition and no other information. The search can
be reduced in many situations with some guidance on where to look the solutions. Informed
algorithms use additional information about the problem in order to reduce the search.
Learning objectives for this week are:
1. To implement A
∗
algorithm
2. To compare search strategies: DFS, BFS, UCS, A
∗
3. To formulate your own search problem
4. To define admisible and consistent heuristics for A
∗
3.1 A* algorithm
Informed search strategy uses problem-specific knowledge beyond the definition of the problem
itself. Best-first search is Graph-search in which a node is selected for expansion based on an
evaluation function. Evaluation function f is an estimation of the real cost.
A
∗
algorithm is the most widely known best-first search algorithm. The evaluation of a
node combines the cost to earch the node from the initial state with the estimated cost to get
from the node to the goal.
f(n) = g(n) + h(n)
h(n) is the heuristic. An admisible and consistent heuristic guarantees the optimality of A
∗
.
3.2 Admissible and consistent heuristics
An admissible heuristic never overestimates the cost to reach the goal. A consistent heuristic
meets the following condition for each nodes n and n
0
:
h(n) ≤ c(n, a, n
0
) + h(n
0
)
Exercise 3.1 Read from AIMA section 3.5.2 - Minimizing the total estimated solution cost.
19

1 2 3 4
x
1
2
3
y
P
q
(3 − 1)
2
+ (3 − 1)
2
1 2 3 4
x
1
2
3
y
P
|3 − 1|+ |3 − 1|
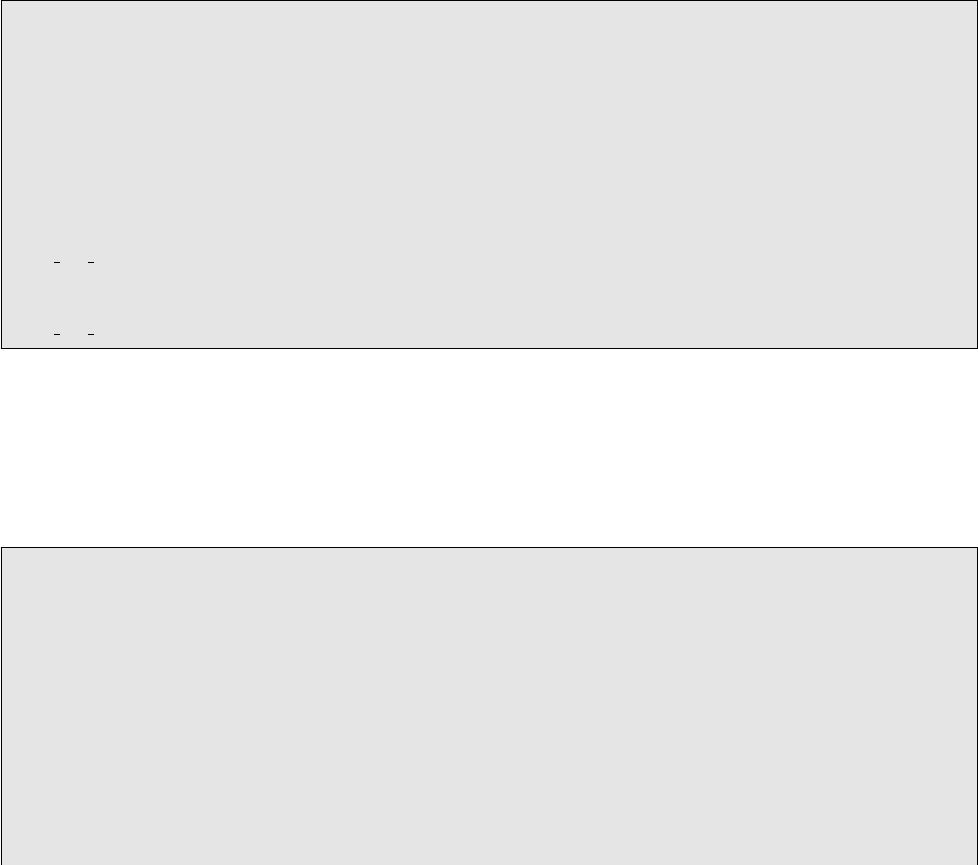
Figure 3.1: Euclidian and Manhattan Distance
For Pacman food-dot problem, good heuristic are Euclidian and Mahattan distances between
two positions (see figure 3.1). Let’s analyze the behaviour of A
∗
with Manhattan Distance as
heuristic on the layout 4x3 from figure 3.1, with Pacman in (3, 3) and food-dot in (1, 1) .
n
th
Nodes added to frontier Expanded g h f
1 (3, 3)
(3, 3)→(3, 2)(South) 1 3 4
(3, 3)→(4, 3)(East) 1 5 6
(3, 3)→(2, 3)(West) 1 3 4
2 (3, 2)
(3, 2)→(3, 1)(South) 2 2 4
(3, 2)→(4, 2)(East) 2 4 6
(3, 2)→(2, 2)(West) 2 2 4
3 (2, 3)
(2, 3)→(2, 2)(South) 2 2 4
(2, 3)→(1, 3)(West) 2 2 4
4 (3, 1)
(3, 1)→(4, 1)(East) 3 3 6
5 (2, 2)
(2, 2)→(1, 2)(West) 3 1 4
6 (1, 3)
(1, 3)→(1, 2)(South) 3 1 4
7 (1, 2)
(1, 2)→(1, 1)(South) 4 0 4
8 (1, 1)
Solution: West, South, West, South
1 2 3 4
x
1
2
3
y
5
4
3
4
3
3
2
2
2
1
0
Heuristic values
1 2 3 4
x
1
2
3
y
1
2
3
4
5
6
7
8
Expanded states
1 2 3 4
x
1
2
3
y
Solution
Figure 3.2: A
∗
algorithm on simple layout. Heuristic Values, Expansion order, Solution.
In figure 3.2 you can observe the order in which the nodes are added into and extracted
from the frontier. You can observe also that the optimal solution has cost 4. During the search,
the cost of the paths increases, while the heuristic value decreases as we get closer to the goal.
The value of every heuristic in goal must be zero. None of the states on the right of the initial
position of Pacman are expanded, since their value for f = 6 is greater than the cost of the
solution 4. Many states with f value equal to the cost of the solution are expanded. In case
there are more states on the frontier with the same f value, any state can be extracted.
Exercise 3.2 Question 4. Go to aStarSearch in search.py and implement A
∗
search algo-
rithm. A
∗
is graphs search with the frontier as a priorityQueue, where the priority is given by
the function g = f + h
20

• Test your implementation by searching for a solution for finding a food dot with the use
of Manhattan Distance heuristic by using the option heuristic
1 python pacman . py -l bigMaze -z .5 -p Sear chAg ent -a fn = astar ,
heuristic = manhatt anHeu risti c
• Does A
∗
and UCS find the same solution or they are different?
• Does A
∗
finds the solution with fewer expanded nodes than UCS?
• Test with autograder python autograder.py that you obtain 3 points for Question 4.
For more details, go to the project’s page http://ai.berkeley.edu/search.html#Q4
3.3 Finding all corners. Eating all food
A
∗
algorithm is a very powerful algorithm. In order to prove this, you will work with another
two search problems: firstly, Pacman needs to find all four corners, secondly, Pacman needs to
eat all the food-dot available. Don’t forget the walls. When it comes to finding all corners, you
will practice your ability to describe search problems. Then, you will deal with the efficiency
of heuristics. Better the heuristics, lesser the number of expanded nodes. You are asked to
propose heuristics for both problems: all corners and all food-dot.
Exercise 3.3 Question 5. Pacman needs to find the shortest path to visit all the corners,
regardless there is food dot there or not. Go to CornersProblem in searchAgents.py and
propose a representation of the state of this search problem. It might help to look at the exist-
ing implementation for P ositionSearchP roblem. The representation should include only the
information necessary to reach the goal. Read carefully the comments inside the class Corner-
sProblem.
• Test your implementation with BFS - remember that BFS finds the optimal solution in
number of steps (not necessarilly in cost). The cost for each action is the same for this
problem.
1 python pacman . py -l tin yCor ners -p Se arch Agent -a fn = bfs , prob =
CornersProblem
2 python pacman . py -l medium Cor ner s -p S earc hAge nt -a fn = bfs , prob =
CornersProblem
For hint and more details, go to the project’s page http: // ai. berkeley. edu/ search.
html# Q5 .
For mediumCorners, BFS expands a big number - around 2000 search nodes. It’s time to
see that A
∗
with an admissible heuristic is able to reduce this number.
Exercise 3.4 Question 6. Implement a consistent heuristic for CornersProblem. Go to the
function cornersHeuristic in searchAgent.py.
• Test it with
1 $ python pacman . py -l mediumC orn ers -p SearchA gent -a fn =
aStarSearch , prob = CornersProblem , heuri stic = corners Heu risti c
2 or
3 $ python pacman . py -l mediumC orn ers -p AS tar Co rne rsA ge nt -z 0.5
21

The heuristic is tested for being consistent, not only admissible.
Grading depends on the number of nodes expanded with your solution.
Number of nodes expanded Grade
more than 2000 0/3
at most 2000 1/3
at most 1600 2/3
at most 1200 3/3
Exercise 3.5 Question 7 Propose a heuristic for the problem of eating all the food-dots. The
problem of eating all food-dots is already implemented in F oodSearchP roblem in searchAgents.py.
• Test your implementation of A
∗
on F oodSearchP roblem by running
1 python pacman . py -l testSear ch -p AStar Fo odS ea rchAg ent
2 identica l to
3 python pacman . py -l testSear ch -p SearchAg ent -a fn = astar , prob =
FoodSearchProblem , he urist ic = fo odH eur ist ic .
The existing heuristic foodHeuristic returns 0 for each node (trivial heuristic), therefore
the previos running is the same with UCS. For the layout testSearch the optimal solution
is of length 7, while for tinySearch layout is of length 27. The number of expanded nodes
for tinySearch is very large: around 5000 nodes.
• Go to foodHeuristic function in searchAgents.py and propose an admissible and consis-
tent heuristic. Test it on trickySearch layout. On this layout, UCS explores more than
16000 nodes.
• Test with autograder python autograder.py. Your score depends on the number of
expanded states by A
∗
with your heuristic.
Number of expanded nodes Grade
more than 15000 1/4
at most 15000 2/4
at most 12000 3/4
at most 9000 4/4
at most 7000 5/4
For maximum score, you need to get in autograder 3 points for Question 4, 3 points for Question
5, 3 points for Question 6, and 4 points for Question 7.
Exercise 3.6 For F oodSearch problem, compare the results of the application of your solutions
on different layouts and different algorithms. You can also propose new layouts.
Layout Algorithm No of Expanded nodes Path cost Time
tinySearch DFS 59 41 0.0s
UCS 5057 27 3.1s
A
∗
974 27 0.6s
trickySearch
....
22

3.4 Solutions to exercises
Solution for exercise 3.2.
Pay attention to
• the number of arguments of aStarSearch function
• the number of arguments of the heuristics: two heuristics are defined for Position-
SearchProblem in searchAgents.py - Manhattan Heuristic and Euclidian Heuristic
• the real cost of a node from the initial state does not depend on the heuristic; only
the path from the initial state to the goal state through that node depends on the
heuristic
• if you already implemented DFS or UCS as graph search, for A
∗
the changes should
relate mainly to the frontier
The answer should be yes for the question whether A
∗
finds the solution with fewer
expanded nodes than UCS. For bigMaze, you could get 549 with A
∗
vs. 620 with UCS
search nodes expanded, but these values can differ according to the order you put into
the frontier the successor nodes.
23

Chapter 4
Adversarial search
Learning objectives for this week are:
1. To understand how optimal decision can be taken in multi-agent environment
2. To implement evaluation functions of a state in Pacman game with ghosts
3. To implement MINIMAX algorithm and Alpha-beta prunning
We will extend the Pacman scenario with multi-agents. That is, we will consider also
the ghosts. Download the multiagent framework for Pacman from https://s3-us-west-2.
amazonaws.com/cs188websitecontent/projects/release/multiagent/v1/002/multiagent.
zip. The description of the project is at http://ai.berkeley.edu/multiagent.html.
Pacman can do five actions: North, South, East, W est, and Stop. Pacman can eat power
pellet and scare the ghosts: for a certain number of moves, the ghosts will be scared and Pacman
can eat them. Rules for the score are: eating one food: +10 points, win/loose +500/-500 points,
each time step: -1 point. All the rules are defined in class P acmanRules from pacman.py.
Exercise 4.1 Read the comments in class GameState from pacman.py. The class specifies
the full game state.
Exercise 4.2 Short python exercise: use list comprehension for computing the following sets:
S = {x
2
|x ∈ {0...9}}
T = {1, 13, 16}
M = {x|x ∈ S and x ∈ T and x even}
4.1 Reflex agent
We create here a reflex agent which chooses at its turn a random action from the legal ones.
Note that this is different from the random search agent, since a reflex agent does not build a
sequence of actions, but chooses one action and executes it. The random reflex agent appears
in listing 4.1.
Listing 4.1: Random reflex agent
1 class R andomAgent ( Agent ):
2
24
3 def getAction ( self , gameState ) :
4 leg alMo ves = gam eState . ge tLe gal Act ions ()
5 # Pick randomly among the legal
6 chosen Inde x = random . choice ( range (0 , len ( legalMov es ) ))
7 return legalMove s [ chosen Inde x ]
Exercise 4.3 Add the class RandomAgent to multiagent.py. Run it with:
1 python pacman . py -p R andomAgent -l testCla ssic
In some situations, Pacman wins, but most of the time it looses. A better reflex agent is
already described in multiagent.py.
Exercise 4.4 Run and analyze Ref lexAgent from multiagent.py.
1 python pacman . py -p Ref lexA gent
2 python pacman . py -p Ref lexA gent -l te stCl assic
Exercise 4.5 Read the content of functions getAction, evaluationF unction, scoreEvaluation−
F unction.
This reflex agent chooses its current action based only on its current perception. The
ReflexAgent gets all its legal actions, computes the scores of the states reachable with these
actions and selects the states that results into the state with the maximum score. In case more
states have the maximum score, it will choose randomly one. The agent still looses many times.
Exercise 4.6 Think about how you could improve the agent by using the variables newF ood,
newGhostState, newScaredT imes available for all the successor states. Print these variables
in function evaluationF unction of the ReflexAgent.
Exercise 4.7 For each legal action, print the position of Pacman, the position of ghosts, and
the distance between Pacman and the ghosts.
Exercise 4.8 Question 1. Improve the ReflexAgent such that it selects a better action. Include
in the score food locations and ghost locations. The layout testClassic should be solved more
often.
• Test your solution on testClassic layout.
1 python pacman . py -p Ref lexA gent -l te stCl assic
• You can speed up the animation with the option f rameT ime. The number of ghost is
given with option k.
1 python pacman . py -- frameT ime 0 -p R efle xAge nt -k 1 -l medium Cla ssi c
2 python pacman . py -- frameT ime 0 -p R efle xAge nt -k 2 -l medium Cla ssi c
For an average evaluation function, the agent will loose for two ghosts.
• Test your solution with autograder for Question 1.
1 python auto grad er . py -q q1
25

or
1 python auto grad er . py -q q1 --no - graphics
Grading is computed as follows
Out of 10 runs on openClassic layout:
0 the agent times out or looses all the time
1 the agent wins at leat 5 times
2 the agent wins all 10 games
+1 the average score is > 500
+2 the average score is > 1000
More details can be found at http: // ai. berkeley. edu/ multiagent. html .
4.2 Minimax algorithm
In case the world where the agent plans ahead includes other agents which plan against it,
adversarial search can be used. One agent is called MAX and the other one MIN. Utility(s, p)
(called also payoff function or objective function) gives the final numeric value for a game that
ends in terminal state s for player p. For example, in chess the values can be +1, 0,
1
2
. The
game tree is a tree where the nodes are game states and the edges are moves. MAX’s actions
are added first. Then, for each resulting state, the action of MIN’s are added, and so on. A
game tree can be seen in figure 4.1.
Optimal decisions in games must give the best move for MAX in the initial state, then
MAX’s moves in all the states resulting from each possible response by MIN, and so on.
Minimax value ensures optimal strategy for MAX. The algorithm for computing this value is
given in listing 4.2. For the agent in figure 4.1, the best move is a
1
and the minimax value of
the game is 3 (see chapter 5 from AIMA).
MINIMAX(s) =
=UTILITY(s) if TERMINAL-TEST(s)
=max
a∈Actions(s)
MINIMAX(RESULT(s,a)) if PLAYER(s)= MAX
=min
a∈Actions(s)
MINIMAX(RESULT(s,a)) if PLAYER(s)=MIN
Listing 4.2: Minimax algorithm
1 f u n c t i o n MINIMAX−DECISION ( s t a t e ) r e t u r n s an a c t i o n
2 return arg max
a∈ACT I ON S(state)
MIN−VALUE(RESULT( st a t e , a ) )
3
4 f u n c t i o n MAX−VALUE( s t a t e ) r e t u r n s a u t i l i t y va l ue
5 i f TERMINAL−TEST( s t a t e ) then return UTILITY( s t a t e )
6 v ← −∞
7 for each a i n ACTIONS( s t a t e ) do
8 v ← MAX(v , MIN−VALUE(RESULT( st a t e , a ) ) )
9 return v
10
11 f u n c t i o n MIN−VALUE( s t a t e ) r e t u r n s a u t i l i t y v a lu e
12 i f TERMINAL−TEST( s t a t e ) then return UTILITY( s t a t e )
13 v ← ∞
14 for each a i n ACTIONS( s t a t e ) do
15 v ← MIN( v ,MAX−VALUE(RESULT( s t a t e , a ) ) )
16 return v
26

Figure 4.1: Minimax algorithm for two agents
Result(state, a) is the state which results from the application of action a in state. Minimax
algorithm generates the entire game search space. Imperfect real-time decisions involve the use
of cutoff test based on limiting the depth for the search. When the CUTOFF test is met, the
tree leaves are evaluated using an heuristic evaluation function instead of the utility function.
H-MINIMAX(s,d) =
=EVAL(s) if CUTOFF-TEST(s, d)
=max
a∈Actions(s)
H-MINIMAX(RESULT(s,a), d+1) if PLAYER(s)= MAX
=min
a∈Actions(s)
H-MINIMAX(RESULT(s,a), d+1) if PLAYER(s)=MIN
Exercise 4.9 Question 2. Implement H-Minimax algorithm in MinimaxAgent class from
multiAgents.py. Since it can be more than one ghost, for each max layer there are one or
more min layers.
• Test your implementation at certain depth and layouts:
1 python pacman . py -p Mini maxAgen t -l m ini max Cla ssi c -a depth =4
• Test your implementation with autograder for Question 2
1 python autograder .py -q q2
For more hints go to http: // ai. berkeley. edu/ multiagent. html .
Exercise 4.10 Test Pacman on trappedClassic layout and try to explain its behaviour.
1 python pacman . py -p Mini maxAgen t -l t rap ped Cla ssi c -a depth =3
Why Pacman rushes to the ghost? For random ghosts minimax behaviour could be improved.
4.3 Alpha-beta prunning
In order to limit the number of game states from the game tree, alpha-beta α −β prunning can
be applied, where
α = the value of the best (highest value) choice there is so far at any choice point along the
path for MAX
β = the value of the best (lowest-value) choice there is so far at any choice point along the
path for MIN
27

Figure 4.2: Alpha-beta prunning
28

Listing 4.3: Alpha-beta prunning.
1 f u n c t i o n ALPHA−BETA−SEARCH ( s t a t e ) r e t u r n s an a c t i o n
2 v ← MAX−VALUE( st a t e , −∞, ∞)
3 return the a c t i o n i n ACTIONS( s t a t e ) with v al u e v
4
5 f u n c t i o n MAX−VALUE( s t a t e , α, β ) r e t u r n s a u t i l i t y va l ue
6 i f TERMINAL−TEST( s t a t e ) then return UTILITY( s t a t e )
7 v ← −∞
8 f o r each a i n ACTIONS( s t a t e ) do
9 v ← MAX( v , MIN−VALUE(RESULT( s , a ) , α, β ) )
10 i f v ≥ β then return v
11 α ← M AX(α , v )
12 return v
13
14 f u n c t i o n MIN−VALUE( s t a t e , α, β ) r e t u r n s a u t i l i t y va lu e
15 i f TERMINAL−TEST( s t a t e ) then return UTILITY( s t a t e )
16 v ← +∞
17 f o r each a i n ACTIONS( s t a t e ) do
18 v ← MIN( v , MAX−VALUE(RESULT( s , a ) , α, β ) )
19 i f v ≤ α then return v
20 β ← M IN(β , v )
21 return v
Exercise 4.11 Question 3. Use alpha-beta prunning in AlphaBetaAgent from multiagents.py
for a more efficient exploration of minimax tree.
• Test your implementation of smallClassic layout. Similar to exercise 4.9, there is one
MAX agent and possible more MIN agents. alpha − beta prunning with depth 3 will
run comparable to minimax at depth 2. On smallClassic the time should be at most
a few seconds per move.
1 python pacman . py -p AlphaBetaAgent -a depth =3 -l small Classic
• Test your implementation with autograder for Question 3.
1 python autograder .py -q q3
or
1 python autograder .py -q q3 --no - graphics
Don’t forget that the minimax value obtained with alpha beta prunning is the same with
the value obtained for minimax algorithm (both at the same depth). One constraint given
by the autograder is that you must not prune on equality. In theory, you can also allow for
prunning on equality and invoke alpha-beta once on each child of the root node.
In order to obtain the maximum score you must obtain 14 for the first three questions.
29

4.4 Solutions to exercises
Solution for exercise 4.2.
1 s =[ x **2 for x in range (0 ,9) ]
2 t =[1 ,13 ,16]
3 m =[ x for x in s if x % 2 == 0 and x in t ]
4 s
5 # [0 , 1 , 4, 9, 16 , 25 , 36 , 49 , 64]
6 m
7 # [16]
Solution for exercise 4.7.
Add the following lines into evaluationF unction of ReflexAgent:
1 di sta nceToGho sts = [ m anh attan Dis tance ( newPos , gp ) for gp in
suc cesso rGame Sta te . getG ho stP ositi ons () ]
2 print " New position " , newPos
3 print " Ghost posit ions " , s uc ces so rGa meSta te . getG hostP osi ti ons ()
4 print " Di stance to ghosts " , d ist anceT oGh ost s
The Grid class (used for food) has the method asList() which returns a list of positions.
Observations for exercise 4.9
One Pacman move together with all ghost responses make one ply in the game tree. So
a search of depth two involves Pacman and ghosts moving two times.
The function getAction from MinimaxAgent class returns the minimax action from the
current game state with depth having the value self.depth. You must be able to limit
the game tree to an arbitrary depth mentioned with option −a depth = 4. The depth is
stored in self.depth attribute. In order to give the score for the leaves of the minimax
tree use self.evaluationF unction.
It is normal Pacman to lose in some cases. For layout minimaxClassic the minimax
values of the initial state are: 9, 8, 7, −492 for depths 1, 2, 3, and 4.
30

Chapter 5
Propositional logic
This lab will begin presenting how proofs can be build automatically, starting from a set of
axioms assumed to hold. Programs which achieve this are called automated theorem provers,
or just provers for short. The one we will use to illustrate the idea is called Prover9 [18].
Learning objectives for this week are:
1. To see the structure of a Prover9 input file corresponding to a problem
2. To understand the output returned by the prover
3. To be able to explain, step by step, the proof obtained
5.1 Getting started with Prover9 and Mace4
Prover9 searches for proofs; Mace4, for counterexamples. The sentences they operate on could
be written in propositional, first-order or equational logic. This first lab is concerned with
sentences written solely in propositional logic. Here, we have true or false propositions, like P
or Q, but no sentences of type ∀xP (x).
Installing Prover9 and Mace4
Download the current command-line version of the tool (LADR-2009-11A), which is available
at https://www.cs.unm.edu/
~
mccune/mace4/download/LADR-2009-11A.tar.gz. Unpack it,
change directory to LADR-2009-11A, then type make all and follow the instructions on the
screen.
Do not forget to add the bin folder to you PATH, such that you should be able to start
Prover9 by simply typing prover9 in a terminal, regardless your current directory.
5.2 First example: Socrates is mortal
Let us assume the following hold:
1. If someone’s name is Socrates, then he must be a human.
2. Humans are mortal.
3. The guy over there is called Socrates.
Now try to prove that Socrates is a mortal.
31

The assumptions in this tiny, well known knowledge base could be represented formally using
different types of logics. Right now, we employ the simplest one, called Propositional Logic,
which comprises variable names for sentences plus a set of logical operators like ∧, ∨, ¬, →, ↔.
In our example, we’ll use the following set of sentences/propositions:
S: The guy over there is called Socrates
H: Socrates is a human
M: Socrates is mortal
The Prover9 input file containing the implementation is presented in Listing 5.1.
Listing 5.1: Knowledge on Socrates’ mortal nature
1 a s s i g n ( max seconds , 3 0 ) .
2 s e t ( b i n a r y r e s o l u t i o n ) .
3 s e t ( p r i n t g e n ) .
4
5 % 1 . I f someone ’ s name i s S o c ra t e s , then he must be a human .
6 % 2 . Humans are mortal .
7 % 3 . The guy ove r t h e r e i s c a l l e d S o c r a t e s .
8 % 4 . Prove th at S o c r a t e s i s a mortal .
9
10 % S : the guy i s c a l l e d S o c r a t e s
11 % H: S o c r a t e s i s a human
12 % M: S o c r a t e s i s mortal
13
14
15 for mu l as ( as sumptions ) .
16 S .
17 S −> H.
18 H −> M.
19 e n d o f l i s t .
20
21 for mu l as ( g o a l s ) .
22 M.
23 e n d o f l i s t .
Exercise 5.1 Type prover9 -f socrates.in in order to run Prover9 with socrates.in as
an input file. Redirect the output to socrates.out and examine it. Have you obtained a proof
of your goal? (the text Exiting with 1 proof or alike in the file/on the screen should indicate
this).
Input file explained
The input files for Prover9 comprise some distinct parts. In this Section, we will explain the
meaning of each part in the input file for the example in Listing 5.1.
The first part contains some flags. For example, assign(max seconds, 30) limits the pro-
cessing time at 30 seconds, while set(binary resolution) allows the use of the binary resolu-
tion inference rule (clear(binary resolution) would do the opposite). Writing set(print gen)
instructs Prover9 to print all clauses generated while searching for the proof. For now, we don’t
focus on flags, just assume they are given in each exercise. Further, when we might get to fine
tuning them, we’ll use at the comprehensive description provided in the All Prover9 Options
of the online manual (https://www.cs.unm.edu/ mccune/mace4/manual/2009-11A/).
Comment lines start with the % symbol.
The part between formulas(assumptions) and the corresponding end of list contains
the actual knowledge base, i.e., the sentences which are assumed to be true. Sentence S means,
as already mentioned, that the guy is called Socrates, while S → H says that if you are Socrates,
32

then you are a human. You can use − for negation, & for logical conjunction and | for logical
disjunction. Each sentence (called formula) ends with a dot.
The part between formulas(goals) and the corresponding end of list state the goal the
prover must demonstrate, namely M in our case.
Note: By default, Prover9 uses names starting with u, v, w, x, y, z to represent variables in
clauses; thus, for the time being, please avoid using sentence names starting with them.
Output file explained
The output file produced (i.e., socrates.out) starts with some information on the running
process, a copy of the input and a list of the formulas that are not in clausal form. Then,
these clauses are processed according to the algorithm for transforming them into the Clausal
Normal Form and we get:
4 S. [assumption].
5 -S | H. [clausify(1)].
6 -H | M. [clausify(2)].
7 -M. [deny(3)].
Please remember the equivalence between P → Q and ¬P ∨Q, which is used for instance in
line 5. This is what clausify does. One should also notice in line 7 the goal has been added in
the negated form ¬M. This is called reductio ad absurdum: if one both accepts the axioms and
denies the conclusion, then a contradiction will be inferred. Prover9 actually searches for such
a contradiction by repeatedly applying inference rules over the existing clauses till the empty
clause is obtained.
The SEARCH section of the output lists all clauses inferred during search for the proof.
The PROOF section shows just those which actually helped in building the demonstration.
For the example above:
1 S -> H # label(non_clause). [assumption].
2 H -> M # label(non_clause). [assumption].
3 M # label(non_clause) # label(goal). [goal].
4 S. [assumption].
5 -S | H. [clausify(1)].
6 -H | M. [clausify(2)].
7 -M. [deny(3)].
8 H. [resolve(5,a,4,a)].
9 -H. [resolve(7,a,6,b)].
10 $F. [resolve(9,a,8,a)].
Lines 1-4 are the original ones, 5 and 6 are the clausal forms of 1 and 2, while 7 is the
goal denial. Line 8 shows how the resolution is applied over clauses 5 and 4 (Prover9 calls this
”binary resolution”). Propositional resolution inference rules says that if we have P ∨ Q and
¬Q ∨ R, we can infer P ∨ R. The first literal in clause 5 (−S, hence the index a) and the first
literal in clause 4 are ”resolved” and the inferred clause is H. If P is absent, this inference rule
is called ”unit deletion”, or, if R is absent, ”back unit deletion”. Line 10 shows the derived
contradiction.
Exercise 5.2 Add a clause specifying that Socrates is a philosopher (use sentence symbols P
for ”philosopher”). Run Prover9 again and take a look at the generated clauses and at the
produced proof. Is the set of generated clauses different in this case? How about the proof?
33

5.3 A more complex example: FDR goes to war
Given:
1. If your name is FDR, then you are a politician
1
.
2. The name of the guy addressing the Congress is FDR.
3. A politician can be isolationist or interventionist
2
4. If you are an interventionist, then you will declare war.
5. If you are an isolationist and your country is under attack, then you will also declare war
6. The country is under attack.
we intend to prove that war will be declared.
Exercise 5.3 Implement the knowledge above, save it in the file fdr-war.in and use Prover9
to show that war will be declared. Then, try to prove that war will not be declared. Have you
succeeded both times?
Exercise 5.4 Let us add now the following piece to our knowledge base: the country is not
under attack (-attack). The knowledge base contains a contradiction now. Let’s try to show
that war will be declared. Then, try to prove that war will not be declared. Have you succeeded
both times?
As mentioned earlier, Prover9 seeks for a contradiction in the body of clauses which incor-
porates the initial knowledge base and the negated conclusion. If the initial knowledge base is
consistent (with no contradiction), then the only source of contradiction would be the negate
conclusion which has just been added. But, if the initial knowledge base already contains a
contradiction, then Prover9 will eventually derive it, no matter what the added conclusion
might be. So, in this case, everything would be provable. Mace4 can help to detect if there
exists at least one model of a knowledge base, which would mean it is not contradictory. For
example, if no -attack is present in the knowledge base, we can comment out the goal line
and do mace4 -c -f fdr-war.in and, if we get a model of the knowledge base, then we can
be sure it contains no contradiction. Listing 5.2 shows such a model.
Listing 5.2: A model for FDR knowledge base example
1 i n t e r p r e t a t i o n ( 2 , [ number=1, s ec o nd s =0] , [
2
3 r e l a t i o n ( attac k , [ 1 ] ) ,
4
5 r e l a t i o n ( dec l a r e war , [ 1 ] ) ,
6
7 r e l a t i o n ( fdr , [ 1 ] ) ,
8
9 r e l a t i o n ( i n t e r v e n t i o n i s t , [ 0 ] ) ,
10
11 r e l a t i o n ( i s o l a t i o n i s t , [ 1 ] ) ,
12
13 r e l a t i o n ( p o l i t i c i a n , [ 1 ] )
14 ] ) .
1
During Franklin Delano Roosevelt (FDR)’ Presidency, the American public was divided between interven-
tionists and isolationists: people who supported, respectively rejected the US involvment in WWII.
2
Usually you can’t be both, but some people can.
34

Breeze Breeze
Breeze
Breeze
Breeze
Stench
Stench
Breeze
PIT
PIT
PIT
1 2 3 4
1
2
3
4
START
Gold
Stench
Figure 5.1: Wumpus world.
In the output produced by Mace4, relation(attack [1]) means that in the model built,
attack has value TRUE ([0] would mean FALSE). The current model number is specified by
number.
Given a knowledge base KB and a goal G, the ideal situation is to have at least one model
for KB and no model for KB ∧ ¬G. This means that G could be proved based on KB alone.
If KB has no models, Pover9 can find a proof for both G and −G. On the other hand, if a
model for KB ∧ ¬G is found, then no proof for G can be build based on KB alone. In this
latter case, we will say we found counterexample. Mace4 can do this job, maybe in the same
time with Prover9 searching for a proof.
5.4 Wumpus world in Propositional Logic
A 4x4 grid contains one monster called wumpus and a number of pits [23]. Pits must be avoided
and so should be the wumpus room as long as this is alive. We say a room is safe if you can find
neither a pit, nor a live wumpus inside. Squares adjacent to wumpus are smelly, ans so is the
square with the wumpus. Squares adjacent to a pit are breezy. Glitter iff gold is in the same
square. Shooting kills wumpus if you are facing it. Shooting uses up the only arrow. Grabbing
picks up gold if in same square. Releasing drops the gold in same square.
Exercise 5.5 We will use the chessboard-like notation for this problem. Sentence −Sij will
mean there is no smell in the square on column i, line j. Let us assume the agent knows −S11,
−S21 and S12. He also knows −B11, −B12, B21. Write down sentences to express ”if there
is a wumpus in (1,2), then there is a smell in (1,1)”. Write down sentences to express ”if I
can smell something in (1,1), then there is a wumpus in (1,2) or in (2,1)”. Can you prove the
wumpus is in (1,3)?
35
Exercise 5.6 The agent is in the initial state (corner (1,1)) and perceives no smell and no
breeze. No other perceptions are available, so you should drop all of them from your knowledge
base. Can you prove now the following squares are safe for the agent to go there: (1,2); (2,1);
(2,2)? Let’s assume the agent goes in one of the squares he has proven to be safe and gets some
perceptions from there. List the whole set of rooms which could be proven to be safe, given the
new information available. Repeat the process until no safe room can be added.
Exercise 5.7 Write down a rule which says: a room is safe if there is no pit in it and there is
no alive wumpus in it. Can you prove room (1,3) is safe, using only percepts obtained from safe
rooms? Can you write enough rules for the agent to safely navigate among the whole castle,
unti he gets the gold?
36

5.5 Solutions to exercises
Solution to exercise 5.2 Yes - P is also inferred, even if not relevant. No - the proof
remains the same, as only some of the generated sentences are part of it and P is not
among them.
Solution to exercise 5.3 You should be able to automatically prove the sentence ”War will
be declared”, but not the sentence ”War will not be declared”. The message ”SEARCH
FAILED” and ”Exiting with failure” should be seen on the screen. That means Prover9
has stopped searching and failed to find a proof.
Solution to exercise 5.5
Listing 5.3: First wumpus problem
1 a s s i g n ( max seconds , 3 0 ) .
2
3 for mu l as ( as sumptions ) .
4 −S11 .
5 −S21 . %c o l o n 2 , l i n e 1
6 S12 .
7 −B11 .
8 B21 .
9 −B12 .
10 W11 −> S11 .
11 W11 −> S12 .
12 W11 −> S21 .
13 W12 −> S12 .
14 W12 −> S11 .
15 W12 −> S22 .
16 W12 −> S13 .
17 W21 −> S21 .
18 W21 −> S11 .
19 W21 −> S22 .
20 W21 −> S13 .
21 W22 −> S22 .
22 W22 −> S21 .
23 W22 −> S12 .
24 W22 −> S23 .
25 W22 −> S32 .
26 W13 −> S13 .
27 W13 −> S14 .
28 W13 −> S23 .
29 W13 −> S12 .
30 W31 −> S31 .
31 W31 −> S21 .
32 W31 −> S32 .
33 W31 −> S41 .
34 S12 −> W11 | W22 | W13 | W12.
35 e n d o f l i s t .
36
37 for mu l as ( g o a l s ) .
38 W13.
39 e n d o f l i s t .
37

Chapter 6
Models in propositional logic
The problem of efficiently finding models for formulas is present in many fields belonging to
Computer Science and particularly in Artificial Intelligence.
Learning objectives for this week are:
1. To understand how to encode knowledge in a form suitable for Prover9 and Mace4
2. To see how obtaining models for a given set of clauses is connected with building
proofs
Henceforth, we will use for our experiments a knowledge base named KB, comprising one
or more clauses connected by a logical AND. We will focus on testing whether KB has at least
one model (a set of assignments of truth values to its propositional variables which make it
true) and whether a given goal sentence g could be proven based on the KB content.
We say a proposition is satisf iable if it has at least one model; otherwise, it is unsatisfiable.
A proposition is valid if it is true no matter the truth values assigned to its components.
6.1 Formalizing puzzles: Princesses and tigers
We will start with formalizing a logical puzzle described in [22], who borrowed it from [24].
A prisoner is given by the King holding him the opportunity to improve his situation if he
solves a puzzle. He is told there are three rooms in the castle: one room contains a lady and
the other two contain a tiger each. If the prisoner opens the door to the room containing the
lady, he will marry her and get a pardon. If he opens a door to a tiger room though, he will be
eaten alive. Of course the prisoner wants to get married and be set free than being eaten alive.
The door of each room has a sign bearing a statement that may be either true or false. The
sign on the door of the room containing the lady is true and at least one of the signs on the
doors of the rooms containing tigers is false. The signs say respectively:
• (The sign on the door of room #1): There is a tiger in room #2.
• (The sign on the door of room #2): There is a tiger in this room.
• (The sign on the door of room #3): There is a tiger in room #1.
Exercise 6.1 At a job interview, you are asked to solve this puzzle. Can you tell in which
room the lady is?
38
Let’s try to formalize what we know as an input for Prover9/Mace4, except won’t specify
the goal we intend to prove (a.k.a. the conjecture). Once done this, we will use Mace4 to see
how many models it can find. If we obtain just one model (which is usually the case when
dealing with this type of puzzles), we can see the solution immediately; for example, we will
know the lady is in room #1. Then, we can add this finding as a goal to the input file and
use Prover9 to build a proof for it. If we end up with more than one model, there is still hope:
either in all of them the lady is in the same room, or we can ask for more clues.
Exercise 6.2 How can we express the fact that there exists a lady in the castle? Write this
information alone in the oneLadyTwoTigers-step1.in file, then call Mace4 to generate as
many models as it can for this tiny KB. The command you need is: mace4 -c -n 2 -m -1
-f oneLadyTwoTigers-step1.in | interpformat. The -f option specifies the input file for
Mace4; -m -1 tells to generate as many models as possible; -n 2 specifies a model complexity
measure, while -c asks Mace4 (for compatibility purposes) to ignore Prover9 options it does
not understand. The interpformat command is used here for pretty printing the models. How
many models do you get? How come?
Now, we will tell the system the lady is unique (i.e., there is only one lady in the castle).
The knowledge base looks like in listing 6.1:
Listing 6.1: There is precisely one lady in the castle.
1 for mu l as ( as sumptions ) .
2 %t h e r e i s a la dy i n room 1 , 2 or 3
3 l1 | l 2 | l 3 .
4 %no la dy i n more than 1 room ; t h e p r i n c e s s i s u n iq u e
5 l1 −> −l 2 .
6 l1 −> −l 3 .
7 l2 −> −l 1 .
8 l2 −> −l 3 .
9 l3 −> −l 1 .
10 l3 −> −l 2 .
11 e n d o f l i s t .
12
13 for mu l as ( g o a l s ) .
14 e n d o f l i s t .
Exercise 6.3 How many models for the new KB does Mace4 produce now?
We go on by specifying that there are 2 tigers in the castle, in separate rooms, and there is
no tiger in the room where the lady stays (see listing 6.2).
Listing 6.2: The lady and the tigers stay in separate rooms.
1 for mu l as ( as sumptions ) .
2 %t h e r e i s a la dy i n room 1 , 2 or 3
3 l1 | l 2 | l 3 .
4 %no la dy i n more than 1 room ; t h e p r i n c e s s i s u n iq u e
5 l1 −> −l 2 .
6 l1 −> −l 3 .
7 l2 −> −l 1 .
8 l2 −> −l 3 .
9 l3 −> −l 1 .
10 l3 −> −l 2 .
11
12 %t h e r e ar e 2 t i g e r s in two o f the rooms 1 , 2 or 3
13 t1 & t2 | t2 & t3 | t 1 & t3 .
39

14
15 %no t i g e r in the room where the lad y s t a y s
16 l1 −> −t 1 .
17 l2 −> −t 2 .
18 l3 −> −t 3 .
19 %do we a l s o have to w r i t e t1 −> −l 1 and a l i k e , or do we a l r e a d y have th at ?
20
21 e n d o f l i s t .
22
23 for mu l as ( g o a l s ) .
24 e n d o f l i s t .
Exercise 6.4 We wrote l1 − > -t1 in order to say ”if the lady is in room #1, then there
is no tiger in the first room”. Do we also have to write t1 − > -l1 in order to say ”tiger in
room #1 means no lady in room #1”? Why (not)?
So far, we have formalized the common sense knowledge about the field. Although obvious,
this knowledge is vital for the systems to be able to build models and to exclude some of those
inconsistent with the problem statement. Further, we will encode the clues on the doors. This
part requires a certain effort from the programmer as in Propositional Logic we are not allowed
to use sentences about some other sentences: we can’t simply say ”if John is from country C,
then, for every sentence P John says, ¬P is true”.
Thus, we will need to interpret the meaning of the sentence on each door and tell Prover9
the result of this interpretation. As an example, if we assume the princess is in room #3, then
the clue on the door is true, so we jump to the conclusion a tiger is present in room #1. What
we will state is precisely this: l3 -> t1. The full input file is given in listing 6.3:
Listing 6.3: One lady and two the tigers: full KB.
1 for mu l as ( as sumptions ) .
2 %t h e r e i s a la dy i n room 1 , 2 or 3
3 l1 | l 2 | l 3 .
4 %no la dy i n more than 1 room ; t h e p r i n c e s s i s u n iq u e
5 l1 −> −l 2 .
6 l1 −> −l 3 .
7 l2 −> −l 1 .
8 l2 −> −l 3 .
9 l3 −> −l 1 .
10 l3 −> −l 2 .
11
12 %t h e r e ar e 2 t i g e r s in two o f the rooms 1 , 2 or 3
13 t1 & t2 | t2 & t3 | t 1 & t3 .
14
15 %no t i g e r in the room where the lad y s t a y s
16 l1 −> −t 1 .
17 l2 −> −t 2 .
18 l3 −> −t 3 .
19
20
21 %c l u e on door #1: t h e r e i s a t i g e r in room #2
22 l1 −> t2 .
23
24 %c l u e on door #2: t h e r e i s a t i g e r h er e
25 l2 −> t2 .
26
27 %c l u e on door #3: t h e r e i s a t i g e r in room #1
28 l3 −> t1 .
29
40

30 %at l e a s t one o f the c l u e s on t i g e r rooms l i e s .
31 ( t1 & t2 ) −> (−t2 | −t2 ) .
32 ( t2 & t3 ) −> (−t2 | −t1 ) .
33 ( t1 & t3 ) −> (−t2 | −t1 ) .
34
35 e n d o f l i s t .
36
37 for mu l as ( g o a l s ) .
38 e n d o f l i s t .
Exercise 6.5 Ask Mace4 to generate all models. How many do you get? Is the lady in the
same room in all of them? If so, add the position of the lady to the input file as a conjecture
and ask Prover9 to prove it. Take a look at the proof.
Exercise 6.6 Let’s drop the assumption that at least one of the clues on the tiger room lies.
Ask Mace4 to generate all models in this situation. How many do you get? Is the lady in the
same room in all of them?
Let us assume we have one room containing the lady, one containing a tiger and one empty
room. If the prisoner opens the door to the room containing the lady, he will marry her and
get a pardon. If he opens a door to a tiger room though, he will be eaten alive. If he opens the
door of the empty room, he will go on with staying in prison.
The sign on the door of the room containing the lady is true. The sign on the door of the
room containing tigers is false. We don’t know anything about the falsehood of the sign on the
empty room The signs say respectively:
• (The sign on the door of room #1): Room #3 is empty.
• (The sign on the door of room #2): The tiger is in room #1.
• (The sign on the door of room #3): This room is empty.
Exercise 6.7 Do you know in which room the lady is now?
Exercise 6.8 Implement the puzzle and repeat all tasks stated in exercise 6.5.
6.2 Finding more models: graph coloring
Typically, puzzles of this sort have a unique solution: we have just one model consistent with all
conditions. We’ll explore now situations when many more models exist. Consider for example
the task of coloring each node of a graph with one color from a given set, such that neighbor
nodes have different colors. We will model this as a set of sentences in Propositional Logic (a
knowledge base) and employ Mace4 once again for finding models of it.
Exercise 6.9 Let us assume we are given a set of 4 nodes a, b, c, d connected by a total of 5
edges, with the edge (b, c) being the only one missing from the 4-nodes clique. We are also given
a set of 3 colors {Red, Green, Blue}. Write down sentences in Propositional Logic to formalize
the coloring restrictions described above, then ask Mace4 to find all models for the knowledge
base. You should carefully express the following:
• each node has assigned at least a color
• no node can have more than one color
41

6.3 Solutions to exercises
Solution to exercise 6.1: The lady is in the first room.
Solution to exercise 6.2:
Listing 6.4: Step 1: there are some ladies in the castle
1 for mu l as ( as sumptions ) .
2 %t h e r e i s a la dy i n room 1 , 2 or 3
3 l1 | l 2 | l 3 .
4 e n d o f l i s t .
5
6 for mu l as ( g o a l s ) .
7 %l 2 .
8 e n d o f l i s t .
You should get 7 models. So far, nobody tells the system there is only one lady. All we
know is there exists at least one.
Solution to exercise 6.3: 3 models: lady in room #1, or in room #2, or #3.
Solution to exercise 6.4: No. We have already expresses that. Check that p → q and
¬q → ¬p are equivalent, then use the equivalence between p → q and ¬p ∨ q.
Solution to exercise 6.5: 1 model: lady in room #1.
Solution to exercise 6.6: 2 models: l1,t2,t3 and t1,t2,l3 respectively.
Solution to exercise 6.7: The lady is once again in the first room.
43
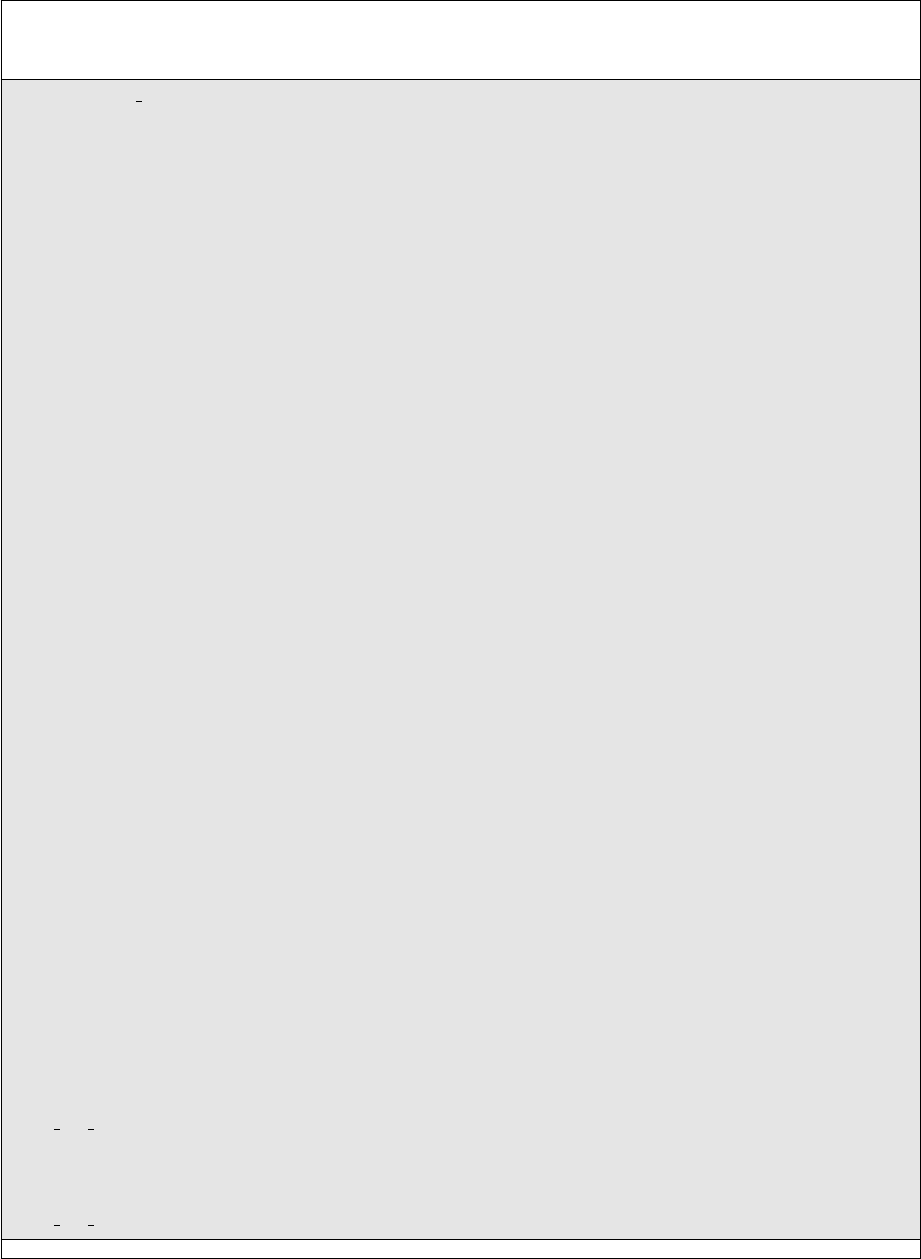
Solution to exercise 6.8:
Listing 6.5: One lady and one tiger plus an empty room
1 a s s i g n ( max seconds , 3 0 ) .
2
3 for mu l as ( as sumptions ) .
4
5 %t h e r e i s a la dy i n room 1 , 2 or 3
6 l1 | l 2 | l 3 .
7 %no la dy i n more than 1 room ; t h e p r i n c e s s i s u n iq u e
8 l1 −> −l 2 . l 1 −> −l 3 . l 2 −> −l 1 .
9 l2 −> −l 3 . l 3 −> −l 1 . l 3 −> −l 2 .
10
11 %t h e r e i s 1 t i g e r in one o f the rooms 1 , 2 or 3
12 t1 | t2 | t3 .
13
14 %no t i g e r in more than 1 room ; t h e t i g e r i s u ni q ue as w e l l
15 t1 −> −t2 . t1 −> −t3 . t 2 −> −t1 .
16 t2 −> −t3 . t3 −> −t1 . t 3 −> −t2 .
17
18 %we have one empty room
19 e1 | e2 | e3 .
20 %but no more than one
21 e1 −> −e2 . e1 −> −e3 . e2 −> −e1 .
22 e2 −> −e3 . e3 −> −e1 . e3 −> −e2 .
23
24 %no t i g e r in the room where the lad y s t a y s
25 l1 −> −t 1 . l 2 −> −t2 . l 3 −> −t3 .
26
27 %th e room where t he lady s t ay s i s not empty
28 l1 −> −e1 . l 2 −> −e2 . l 3 −> −e3 .
29
30 %th e room where a t i g e r s t a y s i s not empty
31 t1 −> −e1 . t2 −> −e2 . t3 −> −e3 .
32
33 %th e c l u e on th e lady ’ s room i s tr u e ; on t h e t i g e r ’ s room i s f a l s e
34 %th e c l u e on th e empty room i s e i t h e r f a l s e or t r u e
35
36 %c l u e on door #1: room #3 i s empty
37 l1 −> e3 . t1 −> −e3 .
38
39 %c l u e on door #2: the t i g e r i s in room #1
40 l2 −> t1 . t2 −> −t1 .
41
42 %c l u e on door #3: t h i s room i s empty
43 l3 −> e3 . t3 −> −e3 .
44 e n d o f l i s t .
45
46 for mu l as ( g o a l s ) .
47 %l 1 .
48 e n d o f l i s t .
44

Solution to exercise 6.9:
Listing 6.6: Graph coloring: 4 nodes and 5 edges
1 for mu l as ( as sumptions ) .
2 %each node has a s s i gn e d at l e a s t a c o l o r
3 a Red | a Green | a Bl ue .
4 b Red | b Green | b Blue .
5 c Red | c Green | c Blu e .
6 d Red | d Green | d Blue .
7
8 %no node can have more than one c o l o r
9 a Red −> −a Blu e .
10 a Red −> −a Green .
11 a Green −> −a Bl ue .
12
13 b Red −> −b Blue .
14 b Red −> −b Green .
15 b Green −> −b Blue .
16
17 c Red −> −c Blu e .
18 c Red −> −c Green .
19 c Green −> −c B l ue .
20
21 d Red −> −d Blue .
22 d Red −> −d Green .
23 d Green −> −d Blue .
24
25 %n e igh b o r s cannot have the same c o l o r
26 a Red −> −b Red . a Red −> −c Red .
27 a Red −> −d Red . a Green −> −b Green .
28 a Green −> −c Green . a Green −> −d Green .
29 a Blu e −> −b Blue . a Blu e −> −c B lu e .
30 a Blu e −> −d Blue .
31
32 b Red −> −d Red . b Blue −> −d Blue .
33 b Green −> −d Green .
34
35 c Red −> −d Red . c B lu e −> −d Blue .
36 c Green −> −d Green .
37 e n d o f l i s t .
38
39 for mu l as ( g o a l s ) .
40 e n d o f l i s t .
45

Chapter 7
First Order Logic
It might be tedious to model reasonably large problems in Propositional Logic (PL from now
on), as you need to write a huge amount of propositions to encode the available knowledge.
First Order Logic (FOL in short) offers you some more operators, which allow a more compact
way of writting the same knowledge.
Learning objectives for this week are:
1. To get familiar with encoding knowledge in FOL for Prover9.
2. To see how you can deal with ordered sets in FOL, without using the set of natural
numbers.
One drawback of Propositional Logic it that it does not allow you to write general enough
sentences. For example, you cannot simply write something like ”If there is a pit in square (i, j),
then you can feel breeze in square (i, j)”. If both i and j are in the range 1..4, Propositional
Logic will force you to write 16 sentences of the type P 23 → B23. This makes the knowledge
base to grow rapidly and to become unmanageable.
First Order Logic addresses this by allowing the ∀ (forall) quantifier. All the PL sentences
in the example above could now be collapsed into just one FOL proposition:
∀ i, j : pit(i, j) → breeze(i, j)
Here, pit and breeze are two predicates, each of arity 2, which are true iff the room number (i, j)
contains a pit or a breeze respectively. The arguments i and j are called bound variables. They
are assumed to belong to a known domain (for example, here the domain is the set {1, 2, 3, 4}
for each of them).
7.1 First Example: Socrates in First Order Logic
We will formalize once again the knowledge about Socrates in Lab #5, but this time, we’ll do
it in FOL. Please recall that:
1. Socrates is a human.
2. All humans are mortal.
Our target is to prove that Socrates is a mortal.
First, we need to write down the constants involved, which reffer particular objects in the
domain of discourse. We have here just one person, namely Socrates, so we use all in all one
constant: Socrates.
46

Then, we need to identify the predicates we might need. One of them would be predicate
human(x), which is true iff the object x is a human being. Another predicate which we will
need is mortal(x), which is true iff its argument x is mortal.
In both cases, we assume the domain of value for x is known. For our example, this could be
the set of all creatures who are alive. Hence, human(Socrates) is true, but human(Viserion)
1
or human(Incitatus)
2
are false. Similarly, mortal(Socrates) is true (as we will prove soon),
while mortal(Zeus) is arguably false.
Given these, the Prover9 implementation is given in listing 7.1.
Listing 7.1: Socrates KB in FOL.
1 s e t ( b i n a r y r e s o l u t i o n ) .
2 s e t ( p r i n t g e n ) .
3
4 % 1 . S o c r a t e s i s a human .
5 % 2 . A l l humans ar e mortal .
6 % 3 . Prove th at S o c r a t e s i s a mortal .
7
8 % co n s ta n t : S o c r a t e s
9 % p r e d i c a t e human ( x ) : x i s a human
10 % p r e d i c a t e mortal ( x ) : x i s mortal
11
12
13 for mu l as ( as sumptions ) .
14 human( So k r a te s ) .
15 human( x ) −> mortal ( x ) .
16 e n d o f l i s t .
17
18 for mu l as ( g o a l s ) .
19 mortal ( S o k r at e s ) .
20 e n d o f l i s t .
Exercise 7.1 Run the example in listing 7.1, which is provided in file socratesFOL.in. Look
at the output and try to understand the transformations performed by Prover9 over the input
before the search for a proof begins. Carefully identify the original form and the transformed
form for implications.
Now focus on the PROOF section and follow, step by step, the produced proof. Try to
understand the meaning of the following marks: assumption, clausify, goal, resolve,
deny.
There are two conventions for naming the constants and variables involved in the predicates.
The default convention states that the names of the variables in clauses start with (lower case)
’u’ through ’z’. But if you set the flag called prolog style variables, they will start with
(upper case) ’A’ through ’Z’, as in Prolog. Setting the flag is achieved by adding the following
line to your input file: set(prolog style variables).
We will use the Prolog convention once, in the next example. Then, for the rest of this lab,
we will stick with the former convention.
7.2 FDR goes to war in FOL
We try now to represent a slightly larger knowledge base in FOL: the statements about FDR
in lab #5. We know that:
1
One of the dragons of Daenerys Targaryen from The Game of Thrones
2
The horse of the Roman emperor Caligula, whom he appointed a priest
47

1. FDR is a politician.
2. A politician could be an isolationist or an interventionist (maybe both!).
3. An interventionist would declare war.
4. If US is under attack, even an isolationist would declare war.
5. US is under attack.
We employ the following set of constants and predicates:
• constant: fdr (meaning FDR)
• constant: country us (meaning US)
• predicate: under attack(x) (meaning country x is under attack)
• predicate: politician(x) (meaning x is a politician)
• predicate: interventionist(x) (meaning x is an interventionist)
• predicate: isolationist(x) (meaning x is an isolationist)
• predicate: declare war(x) (meaning x will declare war)
The Prover9 implementation is given in listing 7.2.
Listing 7.2: FDR declares war - FOL version.
1 % FDR i s a p o l i t i c i a n .
2 % A p o l i t i c i a n c ou ld be an i s o l a t i o n i s t or an i n t e r v e n t i o n i s t ( maybe both ! ) .
3 % An i n t e r v e n t i o n i s t would d e c l a r e war .
4 % I f US i s under atta ck , even an i s o l a t i o n i s t would d e c l a r e war .
5 % US i s under a tac k .
6
7 % co n s ta n t : f d r ( meaning FDR)
8 % co n s ta n t : co u n t ry us ( meaning US)
9 % p r e d i c a t e : un d e r at t a c k ( x ) ( meaning co untry x i s under a t t ac k )
10 % p r e d i c a t e : p o l i t i c i a n ( x ) ( meaning x i s a p o l i t i c i a n )
11 % p r e d i c a t e : i n t e r v e n t i o n i s t ( x ) ( meaning x i s an i n t e r v e n t i o n i s t )
12 % p r e d i c a t e : i s o l a t i o n i s t ( x ) ( meaning x i s an i s o l a t i o n i s t )
13 % p r e d i c a t e : d e c la r e w a r ( x ) ( meaning x w i l l d e c l a r e war )
14
15 for mu l as ( as sumptions ) .
16 u n d e r at t a c k ( c o u n try us ) .
17 p o l i t i c i a n ( fd r ) .
18 p o l i t i c i a n ( x ) −> i s o l a t i o n i s t ( x ) | i n t e r v e n t i o n i s t ( x ) .
19 i n t e r v e n t i o n i s t ( x ) −> d e c l a r e w a r ( x ) .
20 i s o l a t i o n i s t ( x ) & u n d er a t ta c k ( co u n t ry u s ) −> d e c l a r e w a r ( x ) .
21 e n d o f l i s t .
22
23 for mu l as ( g o a l s ) .
24 d e c l a r e w a r ( fd r ) .
25 e n d o f l i s t .
Exercise 7.2 Run the example in the file fdr-warFOL.in, which contains the example in
listing 7.2 and repeat the tasks specified in exercise 7.1.
48

In listing 7.3 you can see the same problem modeled using the backward implication operator
(which is similar to the :- symbol in Prolog). Please note the name of variables and constants,
which follow the Prolog convention.
Listing 7.3: FDR declares war - FOL version with backward implications.
1 % FDR i s a p o l i t i c i a n .
2 % A p o l i t i c i a n c ou ld be an i s o l a t i o n i s t or an i n t e r v e n t i o n i s t ( maybe both ! ) .
3 % An i n t e r v e n t i o n i s t would d e c l a r e war .
4 % I f US i s under atta ck , even an i s o l a t i o n i s t would d e c l a r e war .
5 % US i s under a tac k .
6
7 % co n s ta n t : f d r ( meaning FDR)
8 % co n s ta n t : us ( meaning US)
9 % p r e d i c a t e : un d e r at t a c k ( x ) ( meaning co untry x i s under a t t ac k )
10 % p r e d i c a t e : p o l i t i c i a n ( x ) ( meaning x i s a p o l i t i c i a n )
11 % p r e d i c a t e : i n t e r v e n t i o n i s t ( x ) ( meaning x i s an i n t e r v e n t i o n i s t )
12 % p r e d i c a t e : i s o l a t i o n i s t ( x ) ( meaning x i s an i s o l a t i o n i s t )
13 % p r e d i c a t e : d e c la r e w a r ( x ) ( meaning x w i l l d e c l a r e war )
14
15 for mu l as ( as sumptions ) .
16 u n d e r at t a c k ( us ) .
17 p o l i t i c i a n ( fd r ) .
18 ( i s o l a t i o n i s t (P) | i n t e r v e n t i o n i s t (P) ) <− p o l i t i c i a n (P ) .
19 d e c l a r e w a r (X) <− i n t e r v e n t i o n i s t (X) .
20 d e c l a r e w a r (X) <− i s o l a t i o n i s t (X) & u n d er a t ta c k ( us ) .
21 e n d o f l i s t .
22
23 for mu l as ( g o a l s ) .
24 d e c l a r e w a r ( fd r ) .
25 e n d o f l i s t .
Now, listing 7.4 shows you how some predefined operators of Prover9 could be redefined. We
did this with 3 operators, in order to make them look similar with their Prolog counterparts.
For instance, the line
redeclare(backward implication, "COLON MINUS").
means the usual operator for the backward implication, i.e., ←, is replaced by the string
"COLON MINUS", which resembles the :- construction in Prolog (simply redefining ← as :-
failed as the colon character is used in Prover9 for the cons operator). Now, instead of writting
a(x) <- b(x), we’ll have to write a(x) COLON MINUS b(x).
In line with this, the disjunction operator (|) was replaced ”SEMICOLON” and the con-
junction operator (&) became ”COMMA”.
Listing 7.4: FDR declares war - Prolog-style syntax.
1 % FDR i s a p o l i t i c i a n .
2 % A p o l i t i c i a n c ou ld be an i s o l a t i o n i s t or an i n t e r v e n t i o n i s t ( maybe both ! ) .
3 % An i n t e r v e n t i o n i s t would d e c l a r e war .
4 % I f US i s under atta ck , even an i s o l a t i o n i s t would d e c l a r e war .
5 % US i s under a tac k .
6
7 % co n s ta n t : f d r ( meaning FDR)
8 % co n s ta n t : us ( meaning US)
9 % p r e d i c a t e : un d e r at t a c k ( x ) ( meaning co untry x i s under a t t ac k )
10 % p r e d i c a t e : p o l i t i c i a n ( x ) ( meaning x i s a p o l i t i c i a n )
11 % p r e d i c a t e : i n t e r v e n t i o n i s t ( x ) ( meaning x i s an i n t e r v e n t i o n i s t )
12 % p r e d i c a t e : i s o l a t i o n i s t ( x ) ( meaning x i s an i s o l a t i o n i s t )
13 % p r e d i c a t e : d e c la r e w a r ( x ) ( meaning x w i l l d e c l a r e war )
49

14
15 s e t ( p r o l o g s t y l e v a r i a b l e s ) .
16 r e d e c l a r e ( bac k wa r d i m pl ica t io n , ”COLON MINUS” ) .
17 r e d e c l a r e ( d i s j u n c t i o n , ”SEMICOLON” ) .
18 r e d e c l a r e ( conj unc t io n , ”COMMA” ) .
19
20 for mu l as ( as sumptions ) .
21 u n d e r at t a c k ( us ) .
22 p o l i t i c i a n ( fd r ) .
23 ( i s o l a t i o n i s t (P) SEMICOLON i n t e r v e n t i o n i s t (P) ) COLON MINUS p o l i t i c i a n (P ) .
24 d e c l a r e w a r (X) COLON MINUS i n t e r v e n t i o n i s t (X) .
25 d e c l a r e w a r (X) COLON MINUS i s o l a t i o n i s t (X) COMMA u n d e r at t a c k ( us ) .
26 e n d o f l i s t .
27
28 for mu l as ( g o a l s ) .
29 d e c l a r e w a r ( fd r ) .
30 e n d o f l i s t .
Exercise 7.3 Run the example in the file fdr-warFOL-Prolog.in, which contains the example
in listing 7.4 and make sure you got one proof. Extract the clauses in the assumptions part,
replace the three string-type operators with their Prolog versions (e.g., COLON MINUS with :-
and alike) and save the them in a file called fdr.pl. Could you load the fdr.pl file in Prolog
and ask if FDR will declare war? Will you get the same answer as in Prover9? Why (not)?
7.3 Alligator and Beer: finding models in FOL
The problem we will model is a variation of the puzzle widely known as Einstein’s riddle. Surely
Uncle Google does the best he can to help you find the solution. It’s time to ask Mace4 to do
the same. For this instance of the problem, the latter is probably faster than the former (both
implementation and running time included).
There are five houses in a row: a, b, c, d and e. Each has a different color (amber, beige,
cyan, denim, emerald) and an owner of different nationality. The owners have differrent cars,
pets and preffer different drinks. We know that:
1. The Austrian lives in the amber house.
2. Cider is drunk in the middle house.
3. The Belgian owns the bulldog.
4. The Czech lives in the first house on the left.
5. The man who owns a Dacia lives next to the man with the eagle.
6. The Czech lives next to the denim house.
7. The Bugatti owner has a cat.
8. The person in the beige house drives a Cadillac.
9. Advocaat is drunk in the cyan house.
10. The Dane drinks eiswein.
11. The Estonian drives an Edonis.
50
12. The Cadillac is always parked in front of the house next to the one with a donkey.
13. The cyan house is immediately to the right of the emerald house.
14. The Aston Martin owner drinks daiquiri.
We want to know:
• Where is the alligator?
• Who drinks beer?
Exercise 7.4 Can you answer the two questions?
We want to model this problem in FOL, then to ask Mace4 to find a model. To this end,
we will use 5 constants, namely {a, b, c, d, e} to denote each of the five houses. For the
other information, we are going to use several predicates of arity one. Hence, amber(x) will
mean that house x has color amber (where x is either a, b, c, d or e), while austrian(x)
will mean the person in house x is of Austrian nationality.
We must model the common sense knowledge about this problem (e.g., to teach Prover9
what ”neighbor” means), then to tell that each house has at least one color, but no more. In
the first attempt, we will do this without using numbers, just FOL constructs.
Then, we will encode all clues using the predicates mentioned above.
Eventually, we will save everyting in the file alligatorBeer1.in and call Mace4 with
command mace4 -c -f alligatorBeer1.in | interpformat. The model produced should
give us the solution.
Exercise 7.5 Using a predicate differentFrom(x,y), write down enough sentences to express
the idea that a,b,c,d,e are distinct from one another. You should come up with a couple of
clauses like differentFrom(a,b). Then, write a clause to say the ”differentFrom” relation is
symmetrical.
Exercise 7.6 Using a predicate rightneighbor(x,y), write down enough sentences to express
the fact that ”b is immediately to the right of a” for every pair in a,b,c,d,e. You should come
up with a couple of clauses like rightneighbor(a,b). Then, write clauses to say that ”it is
not the case that rightneighbor(a,b)”. Complete the rest of the exercises and try to figure
out whether the clause rightneighbor(a,b) is necessary.
Exercise 7.7 Define a predicate neighbor(x,y) which says that you are the neighbor of some-
one either if you live just to his right or he lives just to your right (i.e., you live just to his
left).
Exercise 7.8 Write down clauses to express that each house has at least one nationality, pet,
drink, color, car. E.g., austrian(x) | belgian(x) | czech(x) | dane(x) | estonian(x).
Exercise 7.9 Specify that each property applies to at most one house. How can you do that?
Exercise 7.10 Now try to model the rest of the clues. You may want to write down clauses
like austrian(x) ↔ amber(x). Call Mace4 to generate the models (hopefully there is only
one of them) and explore them in order to extract the required answers.
51

7.4 Solutions to exercises
Hint for exercise 7.3: think about Horn clauses.
Solution for exercise 7.4: The Estonian. The Czech.
Hint for exercise 7.9: try to model this information in the following manner: ”if we have
two houses x and y and both are inhabited by an Austrian, then x and y must be the
same house”.
Solution for exercise 7.5 - 7.10.
See file alligatorBeer1.in.
52

Chapter 8
Inference in First-Order Logic
Adding numbers and an object equality operator would help Prover9 express more easily some
knowledge. Some more inference rules are needed in order to deal with these new elements.
Learning objectives for this week are:
1. To get familiar with resolution and the way clauses are preprocessed before actually
performing it
2. To see how basic arithmetic is managed in Prover9
3. To get familiar with paramodulation inference rule
8.1 Revisiting resolution and skolemization
Resolution
Recall the task of proving colonel West is a criminal as stated in [23], page 336.
The law says it is a crime for an American to sell weapons to hostile nations. The country
Nono, an enemy of America, has some missiles. All of its missiles were sold to it be Colonel
West, who is American.
We possess the following background knowledge: missiles are weapons; enemies of America
are hostile.
Exercise 8.1 Implement in Prover9 the problem about colonel West and prove he is a criminal.
For every predicate, specify the meaning of each of its arguments.
In the proof produced, we have:
8 -Missile(x) | -Owns(Nono,x) | Sells(West,x,Nono). [clausify(2)].
9 Owns(Nono,M1). [assumption].
...
12 -Missile(M1) | Sells(West,M1,Nono). [resolve(8,b,9,a)].
Clause 12 is obtained by performing a resolution over clauses 8 and 9. Here, 8,b means
the second part of clause number 8, namely -Owns(Nono,x) (clause parts are separated by |).
The second sentence needed by the resolution is the first (and only) part of 9, hence the 9,a
notation. The result is clause 12.
Exercise 8.2 Try to follow and explain at least one more resolution step in the proof.
53

Understanding Skolemization
Now let’s focus on Curiosity problem ([23], page 354). We know that:
1. Everyone who loves all animals is loved by someone.
2. Anyone who kills an animal is loved by no one.
3. Jack loves all animals.
4. Either Jack or Curiosity killed the cat, who is named Tuna.
5. Cats are animals. (background knowledge)
Question: Did Curiosity kill the cat?
Prover9 uses all and exists for the logical ∀ and ∃ respectively. By default, variables in
a clause are universally quantified, so all could be omitted. Please be careful to the quan-
tifier scoping: parentheses could be of great help. The best practice is probably to write
exists x ( ) and just after that to fill in the spaces inside the pparentheses
Exercise 8.3 Implement in Prover9 the problem about who killed the cat. Try to prove the
goal ”Curiosity killed Tuna”. Now change the goal to ”There exists someone who killed Tuna”
and try to see who this is. Do you get the correct answer?
Exercise 8.4 In the proof produced, we have: Animal(f1(x)) | Loves(f2(x),x). What do
f1(x) and f2(x) mean?
8.2 Paramodulation and demodulation
We consider as an example a part of a royal family. Elizabeth II is the mother of two sons:
Charles and Andrew. Charles is the father of William and Harry. Elizabeth II is the Queen of
UK. Prince William has become Duke of Cambridge on his wedding day.
The goal is to prove the Queen is the grandparent of the Duke of Cambridge. The imple-
mentation is given in listing 8.1.
Listing 8.1: The Queen and the Duke of Cambridge
1 s e t ( paramodulation ) .
2
3 % c o n s t a n ts : E l i z a b e t h I I ,
4 % p r e d i c a t e Mother ( x , y ) : x i s motehr o f y
5
6 for mu l as ( as sumptions ) .
7 Mother ( El i z a b e t h I I , Ch ar le s ) .
8 Mother ( El i z a b e t h I I , Andrew ) .
9 Father ( Charles , William ) .
10 Father ( Charles , Harry ) .
11 Father ( x , y ) | Mother ( x , y ) −> Parent ( x , y ) .
12 Parent (x , y ) & Parent ( y , z ) −> Grandparent (x , z ) .
13 William = DukeOfCambridge .
14 Queen = E l i z a b e t h I I .
15 e n d o f l i s t .
16
17 for mu l as ( g o a l s ) .
18 Grandparent ( Queen , DukeOfCambridge ) .
19 e n d o f l i s t .
Listing 8.2: The Queen and the Duke of Cambridge - the proof
1 1 Father ( x , y ) | Mother ( x , y ) −> Parent ( x , y ) # l a b e l ( n on cl au se ) . [ assumption ] .
2 2 Parent ( x , y ) & Parent ( y , z ) −> Grandparent ( x , z ) # l a b e l ( no n c l a us e ) . [ assumption ] .
3 3 Grandparent ( Queen , DukeOfCambridge ) # l a b e l ( n o n cl a us e ) # l a b e l ( goal ) . [ goal ] .
54

4 4 −Mother (x , y ) | Parent ( x , y ) . [ c l a u s i f y ( 1 ) ] .
5 5 Mother ( El i z a b e t h I I , C ha rl e s ) . [ assumption ] .
6 7 −Father ( x , y ) | Parent ( x , y ) . [ c l a u s i f y ( 1 ) ] .
7 8 Father ( Charle s , William ) . [ assumption ] .
8 10 −Parent ( x , y ) | −Parent (y , z ) | Grandparent ( x , z ) . [ c l a u s i f y ( 2 ) ] .
9 11 William = DukeOfCambridge . [ assumption ] .
10 12 DukeOfCambridge = William . [ copy ( 1 1 ) , f l i p ( a ) ] .
11 13 Queen = E l i z a b e t h I I . [ assumption ] .
12 14 −Grandparent ( Queen , DukeOfCambridge ) . [ deny ( 3 ) ] .
13 15 −Grandparent ( El i z a b e t h I I , William ) . [ copy ( 1 4 ) , r e w r i t e ( [ 1 3 ( 1 ) , 1 2 ( 2 ) ] ) ] .
14 16 Parent ( E l i z a b e t h I I , Cha r le s ) . [ r e s o l v e ( 4 , a , 5 , a ) ] .
15 18 Parent ( Charles , William ) . [ r e s o l v e ( 7 , a , 8 , a ) ] .
16 20 −Parent ( Charles , William ) . [ ur ( 1 0 , a , 1 6 , a , c , 1 5 , a ) ] .
17 21 $F . [ r e s o l v e (2 0 , a , 1 8 , a ) ] .
Run the example and take a look at the proof, which is copied in Listing 8.2. Clause
15 (15 -Grandparent(ElisabethII,William). [copy(14),rewrite([13(1),12(2)])].) is
obtained from clause 14 by applying demodulation (aka rewriting), using clause 13 and 12. As
stated in the Prover9 documentation [18], demodulation is the process of using a set of oriented
equations to rewrite (simplify, canonicalize) terms. The first part, [13(1), tells that the left
side of clause 13 (i.e., Queen) gets replaced by its right side (ElizabethII) inside clause 14.
The part 12(2) says that DukeOfCambridge is replaced by William. The numbers 1 and 2
indicate the position of rewriting (although this is not fully documented in Prover9).
The ability to deal with equality adds some power to Mace4. Another improvement would
be the possibility to do simple arithmetic. By doing set(arithmetic), you give Mace4 access
to operators like +,*,/ or <.>,<=,>=. A full description of operators is given in [18].
We consider Einstein’s riddle again, but this time using arithmetic operators and properties.
The implementation in alligatorBeer2.in follows the approach in [18]. First, we do:
set(arithmetic).
assign(domain_size, 5).
which will allow us define the ”right neighbor” relation and to tell the five houses are
numbered as {0,1,2,3,4} respectively. Then, we specify that objects in the same category are
mutually distinct:
list(distinct).
[Alligator,Bulldog,Cat,Donkey,Eagle]. % pets are distinct
[Aston_Martin,Bugatti,Cadillac,Dacia,Edonis]. % cars are distinct
...
end_of_list.
To define neighbors, we write:
right_neighbor(x,y) <-> x+1 = y.
neighbors(x,y) <-> right_neighbor(x,y) | right_neighbor(y,x). % y left/right
The clues are simply written like this:
Austrian = Amber.
Exercise 8.5 Solve the puzzle written in this new manner, by typing
mace4 -c -f alligatorBeer1.in | interpformat
Can you tell who drinks beer?
55
The output contains an interpretation consisting of a set of functions and relations, which
actually describe a model produced by Mace4. For example, function(Cat,[2]) tells us ”We
have a cat in house 2” (which is actually the house in the middle).
If you call interpformat with the tex option (interpformat tex), you can generate the
T
E
X output, which could be used further in a L
A
T
E
X file. An excerpt of the output produced
by the call
mace4 -c -f alligatorBeer1.in | interpformat tex
is given in listing 8.3.
Listing 8.3: T
E
X output for Einstein’s Riddle
1 \beg in {t a b l e }[H] \c e n t e r i n g % s i z e 5
2 Amber : 2 \hspa ce {. 5cm}
3 Cat : 2 \hspace {. 5cm}
4 \dot s
5 \end{t a b l e }
The pdf obtained from the generated tex, which obviously needs editing, can be seen at the
end of this file.
The following two examples are taken from the distribution kit of [18]. The first example
asks you to show that a group where x ∗ x = e for all x is commutative. You can find
the implementation in x2.in. Take a look at that, then generate the proof. File x2.out
contains such a proof. Inside, you can find an example of applying an inference rule called
paramodulation. This is basically the resolution modified to deal with equality.
If we look at lines 2, 3, 4 and 7:
2 e * x = x. [assumption].
3 x’ * x = e. [assumption].
4 (x * y) * z = x * (y * z). [assumption].
7 x’ * (x * y) = y. [para(3(a,1),4(a,1,1)),rewrite([2(2)]),flip(a)].
we can see caluse 7 is obtained by applying paramodulation over clauses 3 and 4. Inside
para(3(a,1),4(a,1,1)), 1 refers to the left side and 2 to right side of the equality, while index
a refers to the part of the clause. Given this, we can see that the part x’ * x in 3 will replace
the (x * y) part in the left side of 4. This makes x’ to unify with x and x with y, getting
us (x’ * x) * z = x’ * (x * z). Further, (x’ * x) is replaced by e. The next step is to
apply clause 2 and simplify e * z to z; the last step is to flip the sides of eequalityand obtain
x’ * (x * z) = z, which is basically the clause 7 modulo one variable renaming. The whole
bunch of steps is actually one application of paramodulation.
Exercise 8.6 Drop the condition x ∗ x = e for all x and try to prove or disprove the group
remains commutative.
Exercise 8.7 Can you prove
√
2 is not a rational number?
Prover9, if fed the file sqrt2.in, can generate the proof.
Exercise 8.8 Take a look at the input file and see how the domain is modeled. Generate the
proof. Try to follow and explain at least one more paramodulation step in the proof. Delete the
clause 2 != 1 from the input and see if you get the same result.
Note: You can find many problems implemented at Thousands of Problems for The-
orem Provers [25] (or TPTP for short, http://www.cs.miami.edu/
~
tptp). The program
tptp to ladr might help you translate between formats.
56
8.3 Let’s find the Wumpus!
Exercise 8.9 Consider the Wumpus world scenario again. We assume (1,1) is safe, there is
neither breeze, nor stench, nor gold there and we have a total of 3 pits, 1 wumpus and 1 gold
treasure. Questions:
1. calculate how many different worlds are there which obey the stipulated conditions
2. estimate how many rules you need to write in your knowledge base to find the Wumpus
if you stick with the Propositional Logic
3. write down a knowledge base for the same problem using now the First Order Logic and
arithmetic operators and try to find the Wumpus by successively visiting safe rooms and
adding the perceptions obtained there to your knowledge base.
57

8.4 Solutions to exercises
Solution for exercise 8.1 is given in listing 8.4. It closely follows the solution in [23].
Listing 8.4: Colonel West is a criminal
1 % R u s s e l l , R. and Norvig , P. ( 2 0 1 0 ) . A r t i f i c i a l i n t e l l i g e n c e : A modern
2 % approach , 3 rd E d i t ion . pp . 3 3 6 . P r e n t i c e H a ll : Upper Sad dle River , NJ .
3 %
4 % 1 . I t i s a crime f o r an American to s e l l weapons t o h o s t i l e n a t i o n s .
5 % 2 . The co untry Nono , an enemy o f America , has some m i s s i l e s .
6 % 3 . A l l o f i t s m i s s i l e s were s o l d t o i t be Co l on e l West , who i s American .
7 % 4 . M i s s i l e s a re weapons ( background in f o r m a t i o n )
8 % 5 . Enemies o f America ar e h o s t i l e ( background i n f o r m a t i o n )
9 % Prove t ha t West i s a c r i m i n a l
10 %
11 % c o n s t a n ts : West ( co l . West ) , Nono ( coun try ) , M1 ( m i s s i l e )
12 % p r e d i c a t e American ( x ) : x i s American
13 % p r e d i c a t e Weapon( x ) : x i s a weapon
14 % p r e d i c a t e S e l l s ( x , y , z ) : x s e l l s o b j e c t y t o z
15 % p r e d i c a t e H o s t i l e ( x ) : x i s h o s t i l e
16 % p r e d i c a t e Owns( x , y ) : e n t i t y x owns o b j e c t y
17 % p r e d i c a t e M i s s i l e (x ) : x i s a m i s s i l e
18 % p r e d i c a t e Weapon( x ) : x i s a weapon
19 % p r e d i c a t e Enemy( x , America ) : x i s an enemy o f America
20 % p r e d i c a t e Cr imi nal ( x ) : x i s a c r i m i n a l
21
22 s e t ( p r i n t g e n ) .
23
24 for mu l as ( as sumptions ) .
25 American ( x ) & Weapon ( y ) & S e l l s (x , y , z ) & H o s t i l e ( z ) −> Criminal ( x ) . %1
26 Owns( Nono ,M1) . %2
27 M i s s i l e (M1) . %2
28 Enemy( Nono , America ) . %2
29 M i s s i l e ( x ) & Owns( Nono , x ) −> S e l l s ( West , x , Nono ) . %3
30 American ( West ) . %3
31 M i s s i l e ( x ) −> Weapon( x ) . %4
32 Enemy( x , America ) −> H o s t i l e ( x ) . %5
33 e n d o f l i s t .
34
35 for mu l as ( g o a l s ) .
36 Cri min al ( West ) .
37 e n d o f l i s t .
58

Solution for exercise 8.3 is given in listing 8.5. It closely follows the solution in [23].
Listing 8.5: Curiosity killed the cat
1 % R u s s e l l , R. and Norvig , P. ( 2 0 1 0 ) . A r t i f i c i a l i n t e l l i g e n c e : A modern
2 % approach , 3 rd E d i t ion . pp . 3 5 4 . P r e n t i c e H a ll : Upper Sad dle River , NJ .
3 %
4 % 1 . Everyone who l o v e s a l l anim als i s l ov e d by someone .
5 % 2 . Anyone who k i l l s an animal i s lo ve d by no one .
6 % 3 . Jack l o v e s a l l anim als .
7 % 4 . E it h e r Jack or C u r i o s i t y k i l l e d the cat , who i s named Tuna .
8 % 5 . Cats ar e ani mal s . ( background knowledge )
9 % Did C u r i o s i t y k i l l the c a t ?
10 %
11 % c o n s t a n ts : Jack , C u r i o s i t y , Tuna
12 % p r e d i c a t e Animal ( x ) : x i s an animal
13 % p r e d i c a t e Loves (x , y ) : x l o v e s y
14 % p r e d i c a t e K i l l s ( x , y ) : x k i l l s y
15 % p r e d i c a t e Cat ( x ) : x i s a c a t
16
17 s e t ( b i n a r y r e s o l u t i o n ) .
18
19 for mu l as ( as sumptions ) .
20 a l l x ( a l l y ( Animal ( y ) −> Loves (x , y ) ) −> e xi s t s y ( Loves ( y , x ) ) ) . %1
21 a l l x ( e x i s t s z ( Animal ( z ) & K i l l s (x , z ) ) −> a l l y (−Loves ( y , x ) ) ) . %2
22 a l l x ( Animal ( x ) −> Loves ( Jack , x ) ) . %3
23 K i l l s ( Jack , Tuna) | K i l l s ( C u r i o s i t y , Tuna ) . %4
24 Cat (Tuna ) . %4
25 a l l x ( Cat ( x ) −> Animal ( x ) ) . %5
26 e n d o f l i s t .
27
28 for mu l as ( g o a l s ) .
29 K i l l s ( C u r i o s i t y , Tuna ) .
30 e n d o f l i s t .
Hint for exercise 8.4: remember Skolem functions.
Hint for exercise 8.9: C
3
13
∗ 13 ∗ 15 (positions for pits, wumpus, gold respectively).
Advocaat: 3 Amber: 2 Aston Martin: 4 Austrian: 2 Beige: 0 Belgian: 4
Bugatti: 2 Bulldog: 4 Cadillac: 0 Cat: 2 Cider: 2 Cyan: 3 Czech: 0
Dacia: 1 Daiquiri: 4 Dane: 1 Denim: 1 Donkey: 1 Eagle: 0 Edonis: 3
Eiswein: 1 Emerald: 4 Estonian: 3 Alligator: 3 Beer: 0
neighbors: 0 1 2 3 4
0 0 1 0 0 0
1 1 0 1 0 0
2 0 1 0 1 0
3 0 0 1 0 1
4 0 0 0 1 0
right neighbor: 0 1 2 3 4
0 0 1 0 0 0
1 0 0 1 0 0
2 0 0 0 1 0
3 0 0 0 0 1
4 0 0 0 0 0
Table 8.1: The model for Einstein’s riddle produced by interpformat tex
59

Chapter 9
Constraint satisfaction problems
Learning objectives for this week are:
1. To build constraint network for a set of constraints.
2. To trace the arc consistency algorithm.
3. To see how local search is used to solve CSP
4. To learn that CSP can be solved by satisfiability.
9.1 Solving CSP by consistency checking
This section helps you to understand the arc consistency algorithm. We will use the Consistency
Based CSP Solver from http://www.aispace.org/downloads.shtml. Start the solver with:
1 java −j a r c o n s t r a i n t . j a r
Let D
X
domain of variable X. An arc hX, r(X, Y )i is consistent if for each value x ∈ D
X
there is some value y ∈ D
Y
such that r(x, y) is satisfied. Consistency of an arc hX, r(X, Y )i is
obtained by removing all values x ∈ D
X
for which there is no corresponding value y ∈ D
Y
that
satisfies the constraint.
Arc consistency can be used to reduce to domain of the variables. Let A < B be a constraint
between the variables A and B with D
A
= {4, 5, 6, 7, 8} and variable D
B
= {2, 3, 4, 5, 6}. Note
that for some values in the domain of A there does not exist a consistent value in B’s domain
satisfying the constraint A < B. The corresponding constraints network in Figure 9.1 has two
arcs: hA, A < Bi and hB, A < Bi
Exercise 9.1 What is domain of A and B such that the constraint network to be consistent.
Build the constraint network in the CSP solver. Using the Step mechanism, check if the solver
gives the same solution as you did.
Figure 9.1: A constraint network with two variables and one binary constraint. Arc consistency
algorithm is able to reduce the domains of A and B.
60

Figure 9.2: A constraint network with three variables and two binary constraints. Arc consis-
tency algortihm is able to find the unique solution.
Arc consistency can be complemented with domain splitting to identify a solution. That is,
a consistent assignment of unique values for each variable. Hence, to solve a CSP, two steps
are taken:
1. Simplify the CSP using arc consistency; and,
2. If the problem is not solved, select a variable whose domain has more than one element,
split it, and recursively solve each case (that is domain splitting).
For some CSP, domain splitting is not required, as arc consistency finds itself a solution.
Let the variables A, B, C with D
A
= {1, 2, 3, 4, 5}, D
B
= {1, 2, 3, 4} and D
C
= {1, 2, 3}. Let
the binary constraints A < B and B < C. The constraints network in Figure 9.2 has four arcs:
hA, A < Bi, hB, A < Bi, hB, B < Ci, hC, B < Ci. One possible computation flow is:
i) 1 is removed from the domain of B because of arc hB, A < Bi.
ii) 4 and 5 are removed from the domain of A because of arc hA, A < Bi.
iii) 1 and 2 are removed from the domain of C because of arc hC, B < Ci.
iv) 3 and 4 are removed from the domain of B because of arc hB, B < Ci.
v) 2 and 3 are removed from the domain of A because of arc hA, A < Bi
The arc consistency algorithm is able to find the unique solution A = 1, B = 2, C = 3.
Exercise 9.2 Build the constraint network in the CSP solver. Use the Step mechanism to
trace each step performed by the arc consistency algorithm. Change the default order of making
an arc consistent. You can do this by selecting yourself the arc to check. Did you manage to
find an order for checking arc consistency for which the solution is found in less than 5 steps?
When the arc consistency algorithm terminates and some domains have multiple values,
there is no guarantee that a solution exists. This is one limitation of the arc consistency, as
illustrated by exercise 9.3.
Exercise 9.3 Let the variables A, B, C with D
A
= D
B
= D
C
= {1, 2, 3} and the constraints:
A 6= B, A 6= C and B 6= C.
1. Build the corresponding constraint network and trace the arc consistency algorithm. When
algorithm ends, figure out if a solution is still possible. How many solutions are there?
You can use autosolve button to find all solutions.
2. Restrict the domain of A to {1, 2}. Trace the arc consistency algorithm. How many
solutions exist?
3. Additionally, restrict the domain of B to {1, 2}. Trace the arc consistency algorithm.
How many solutions exist?
4. Additionally, restrict the domain of C to {1, 2}. Trace the arc consistency algorithm.
How many solutions exist?
61

Figure 9.3: Using heuristics to solve CSP.
The order in which arcs are selected does impact the computation. Computation amount
is also influenced by the order in which values are picked for the current variable. Some
heuristics are usefull here. Minimum-remaining-values (MRV) heuristic picks the variable with
the smallest domain. MRV choses the variable that is most likely to cause a failure soon,
thereby pruning the search tree. Degree heuristic picks the variable involved in the largest
number of constraints on other unassigned variables. Least-constraining-value heuristic prefers
the value that rules out the fewest choices for the neighboring variables.
Consider the CSP in Figure 9.3. You have to place numbers 1 through 8 on nodes such that:
1) each number appears exactly once and 2) no connected nodes have consecutive numbers.
One general strategy stressed by Bartak in [2] is: ”Deal with hard cases first: they can only get
more difficult if you put them off.”
Exercise 9.4 For the CSP in figure 9.3 identify the variables, their domains, and the con-
straints involved. Assume that the variables are selected based on the degree heuristic. Which
node will be selected first? What value would you pick from the domain of that node?
The following exercise 9.5 is for students taking gingko biloba daily. It is better to solve
this exercise at the end of the class, if time available. Note that you have to define a global
constraint on all variables (to model that nodes have distinct numbers). To increase speed, you
can save the partial model in xml and work directly on this file.
Exercise 9.5 Build the constraint network from Figure 9.3. Can you solve the problem without
using the Split domain option in the solver?
It is easy to translate satisfiability problems in CSP. Let the formula in conjunctive normal
form:
(¬A ∨ B) ∧ (¬C ∨ A) ∧ (A ∨ B ∨ D) ∧ C
The corresponding constraint hypergraph appears in the left part of figure 9.4. Note that
there is one unary constraint (C = true), two binary constraints (¬A ∨ B), ¬C ∨ A) and
one ternary constraint A ∨ B ∨ D. Applying the arc consistency algorithm, gives the solution
depicted in the right part of figure 9.4.
Exercise 9.6 Build yourself the contraint network for (¬A ∨ B) ∧ (¬C ∨ A) ∧ (A ∨ B ∨ D) ∧
C. Trace the arc consistency algorithm. Split the domain of variable D to obtain solutions.
How many solution are there. Check if Mace4 returns the same number of models. Auto arc
consistency
The following exercise 9.7 is taken from http://www.aispace.org/.
62

Figure 9.4: Boolean formula as CSP.
Exercise 9.7 A family of four needs to figure out how each family member will commute to
work or school given several constraints. The family consists of a mother, father, son and
daughter. Each family member can bicycle or ride in the car. Additionally the son has a pogo
stick he can use for commuting to school. The assignment of transportation modes to family
members is subject to the following constraints:
• There are only two bicycles.
• The car can only hold three people.
• The son and daughter must take the same mode of transportation.
• The son and daughter can only go by car if at least one of the parents is going by car.
Identify the variables and their domains. Solve the CSP yourself. Model the problem in the
CSP solver. Is it able to find the same solution as you did? How many solutions are there?
9.2 Solving CSP with stochastic local search
This section helps you to understand how CSP can be solved with various local search algo-
rithms: Random Walk, Greedy Descent, and Simmulating Annealing. We will use the Stochas-
tic Local Search Based CSP Solver from http://www.aispace.org/downloads.shtml. Start the
solver with:
1 java −j a r h i l l . j a r
The running scenario is 5-Queens problem. That is, placing five queens on chess-like board
of size five, such that no queen attacks another one. Load the sample problem 5queens.xml
developed Knoll et. al [15] and available from the Sample CSP menu. Here, queen A stays on
column A, or queen B on column B. The constraint Queen1 defines conflicts between queens
on consecutive columns: (A, B), (B, C), (C, D), and (D, E). The constraint Queen2 defines
conflicts between queens at a distance of two columns between them: (A, C), (B, D), (C, E).
The constraint Queen3 defines conflicts between queens at a distance of three columns: (A, D),
(B, E). There is only one Queen4 constraint between the queen on column A and the queen on
E.
63

Figure 9.5: Initialising the 5-queens problem.
First, the CSP must be initialized. Here, a value is assigned to each variable in the CSP from
its domain. Assume the random initialisation in Figure 9.2. The red arcs show which queens
atack each others. These arcs are inconsistent according to the custom Queeni constraints.
The total number of conflicts in the network is five.
For local search, a neighbour is one change to variable assignment. In the 5-Queens problem,
a neighbour state is generated by changing the row of one queen only. Here, each state has four
possible neighbours. To generate a neighbour, the degree heuristic picks the most conflicting
variable. The queens introducing the most conflicts are C and E, each with three conflicts.
Assume that queen C is selected, the corresponding neibours are for C = 2, C = 3, C = 4 and
C = 5.
Exercise 9.8 Solve the 5-Queens problem by hand using the support of the CSP solver. You
can mannually select both the queen to be moved and the value for it. After initialisation,
simply select a variable to manually change its value. If you get stuck feel free to re-initialize
the problem. What do you think - to find a solution, would be better to strugle to solve a CSP
which is very close to the solution (i.e only one conflict remaining) or would be better to simply
restart the board?
Batch Run mode can be used to calculate the runtime distribution and plot the percentage
of successes against the number of steps.
Exercise 9.9 Select the Greedy Descent algorithm from the Hill options -> Algorithm
options menu. Does it find a solution within the default number of steps? What about in
1000 steps?
Recall that Greedy Descent is an incomplete algorithm. That is, it is not guaranteed to find
a solution even given infinite number of steps. That is why the runtime distribution flattens
out.
You already know that random restarts improve Greedy Descent by removing its incom-
pleteness.
64

Exercise 9.10 Select now the Greedy Descent with Random Restarts. Does it perform better?
Exercise 9.11 Select now the Greedy Descent with all options. Does it perform better? Inves-
tigate which is the optimal percent for randomness in case of the 8-queens problem.
Exercise 9.12 Select now the Simulating Annealing. Does it perform better?
Exercise 9.13 You might find interesting the Traffic Flow exercise at
http://www.aispace.org/exercises/exercise4-c-2.shtml
9.3 Solving CSP with satisfiability solvers
We will rely on your favorite satisfiability solver, that is Mace4.
N-Queens problem
The two implementations we present are borrowed from [18] and use the arithmetic facilities of
Mace4. The solution in listing 9.1 uses the Q(x,y) predicate to express that there is a queen
in row x, column y. The solution in listing 9.2 employs function Q(x)=y to say the same.
Listing 9.1: N-queens problem using predicates
1 s e t ( ar i t h m e t i c ) .
2
3 for mu l as ( as sumptions ) .
4
5 % R e l a t ion Q( x , y ) means t he r e i s a queen at row x , column y .
6
7 a l l x e x i s t s y Q( x , y ) . % Each row has at ∗ l e a s t ∗ one queen .
8
9 Q( x , y1 ) & Q( x , y2 ) −> y1 = y2 . % Each row has at most one queen .
10
11 Q( x1 , y ) & Q( x2 , y ) −> x1 = x2 . % Each column has at most one queen .
12
13 Q( x1 , y1 ) & Q( x2 , y2 ) & ( x2 + −x1 = y2 + −y1 ) −>
14 x1 = x2 & y1 = y2 . % Each \ d i a g o n a l has at most one queen .
15
16 Q( x1 , y1 ) & Q( x2 , y2 ) & ( x1 + −x2 = y2 + −y1 ) −>
17 x1 = x2 & y1 = y2 . % Each / d i a g o n a l has at most one queen .
18
19 e n d o f l i s t .
Listing 9.2: N-queens problem using functions
1 s e t ( ar i t h m e t i c ) .
2
3 for mu l as ( as sumptions ) .
4
5 % In t h i s r e p r e s e n t a t i o n , Q( i )=n means th at Row i Column n has a queen .
6 % The c o n s t r a i n t th at no queens can be i n t he same row i s always s a t i s f i e d
7 % in t h i s r e p r e s e n t a t i o n , b ecaus e Q i s a f u n c t i o n ; t h a t i s ,
8 % Q( x ) != Q( z ) −> x != z i s always s a t i s f i e d .
9
10 % Note th a t t h e r e i s no b i na ry ”minus” o pe r ati o n , so we have to w r i t e x + −y .
11
12 x != z −> Q( x ) != Q( z ) . % No 2 queens i n the same column .
13
14 x != z −> z + −x != Q( z ) + −Q( x ) . % No 2 queens i n \ d i a g o n a l .
65

15
16 x != z −> z + −x != Q( x ) + −Q( z ) . % No 2 queens i n / d i ag o n a l .
17
18 e n d o f l i s t .
Exercise 9.14 Test both solutions using the -n8 option in the command line. Make sure you
understand the obtained function and relation (if any). Check them. Then, add the -m -1
option to generate all models. How many of them are there?
Exercise 9.15 Repeat the tasks in 9.14 with different values of n.
Cryptarithmetic
As a student at TUCN, you got used to send secret messages to your parents. In such a message,
you asked for some more money.
S E N D +
M O R E
---------
M O N E Y
Your parents will use Mace4 to decript your request. The solution is given in listing 9.3 and
uses C0,... for the values of the carry. The comments are pretty self-explanatory.
Listing 9.3: SEND+MORE
1 s e t ( ar i t h m e t i c ) .
2
3 a s s i g n ( domain s iz e , 1 0 ) . % domain i s {0 , 1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9 }.
4
5 l i s t ( d i s t i n c t ) . %d i s t i n c t l e t t e r s f o r d i s t i n c t d i g i t s
6
7 [D, E,M, N,O, R, S ,Y ] . % s e t o f a l l l e t t e r s
8
9 e n d o f l i s t .
10
11 for mu l as ( as sumptions ) .
12
13 D + E + C0 = Y + 10 ∗ C1 .
14 N + R + C1 = E + 10 ∗ C2 .
15 E + O + C2 = N + 10 ∗ C3 .
16 S + M + C3 = O + 10 ∗ M.
17
18 % No i n i t i a l c a r r y
19 C0 = 0 .
20
21 % Leading z e r o s not a llo we d
22 S != 0 .
23 M != 0 .
24
25 e n d o f l i s t .
Exercise 9.16 Test the example and see how many solutions you obtain. How much money
your parents should send to you?
Exercise 9.17 Model the same problem, without introducing suplimentary variables such as
C0, C1, C2, C3. Test your solution with Mace4.
66

Exercise 9.18 Implement the problem SEND+MOST=MONEY and see how many solutions
you obtain. Which is the maximum value you are hoping to receive from your loving parents?
Which is the minimum value your parents most probable send to you?
Exercise 9.19 Implement in Mace4 the CSP in section 6.1 from [23]. That is TWO + TWO
= FOUR. Would be possible to model the same CSP in the contraint.jar solver?
Exercise 9.20 Following the approach in listing 9.3, implement the problem
ZWEI+VIER+VIER+VIERZIG+VIERZIG=NEUNZIG (In German: 2+4+4+40+40=90)
and see how many solutions you obtain and in how much time. Then implement CSP without
variables for carry and see the new running time.
Sudoku
The example in listing 9.4 adapts the approach in [23] to the 4×4 case.
Listing 9.4: Sudoku 4×4
1
2 for mu l as ( as sumptions ) .
3
4 %a number must be a s s i g n e d to each sq ua re
5 a0 = 0 | a0 = 1 | a0 = 2 | a0 = 3 . %f i r s t l i n e , f i r s t column
6 a1 = 0 | a1 = 1 | a1 = 2 | a1 = 3 . %second l i n e , f i r s t column
7 a2 = 0 | a2 = 1 | a2 = 2 | a2 = 3 .
8 a3 = 0 | a3 = 1 | a3 = 2 | a3 = 3 .
9
10 b0 = 0 | b0 = 1 | b0 = 2 | b0 = 3 . %second l i n e , f i r s t column
11 b1 = 0 | b1 = 1 | b1 = 2 | b1 = 3 .
12 b2 = 0 | b2 = 1 | b2 = 2 | b2 = 3 .
13 b3 = 0 | b3 = 1 | b3 = 2 | b3 = 3 .
14
15 c0 = 0 | c0 = 1 | c0 = 2 | c0 = 3 .
16 c1 = 0 | c1 = 1 | c1 = 2 | c1 = 3 .
17 c2 = 0 | c2 = 1 | c2 = 2 | c2 = 3 .
18 c3 = 0 | c3 = 1 | c3 = 2 | c3 = 3 .
19
20 d0 = 0 | d0 = 1 | d0 = 2 | d0 = 3 .
21 d1 = 0 | d1 = 1 | d1 = 2 | d1 = 3 .
22 d2 = 0 | d2 = 1 | d2 = 2 | d2 = 3 .
23 d3 = 0 | d3 = 1 | d3 = 2 | d3 = 3 .
24
25 %no more than one number i s a s s i g n e d to a s qu ar e
26 ( u = x & u = y ) −> x = y .
27
28
29 %d e f i n i n g the ” mutually d i s t i n c t ” r e l a t i o n f o r 4 v a r i a b l e s
30 a l l d i f f ( x , y , z , u ) −> ( x != y ) & ( x != z ) & ( x != u ) &
31 ( y != z ) & ( y != u ) & ( z != u ) .
32
33 %Sudoku r u l e : numbers i n a l i n e must be d i f f e r e n t from each o t h e r
34 a l l d i f f ( a0 , a1 , a2 , a3 ) . %f i r s t l i n e
35 a l l d i f f ( b0 , b1 , b2 , b3 ) . %second l i n e
36 a l l d i f f ( c0 , c1 , c2 , c3 ) .
37 a l l d i f f ( d0 , d1 , d2 , d3 ) .
38
39 %Sudoku r u l e : numbers i n a column must be d i f f e r e n t from each o t h er
40 a l l d i f f ( a0 , b0 , c0 , d0 ) . %f i r s t column
67

41 a l l d i f f ( a1 , b1 , c1 , d1 ) .
42 a l l d i f f ( a2 , b2 , c2 , d2 ) .
43 a l l d i f f ( a3 , b3 , c3 , d3 ) .
44
45 %Sudoku r u l e : numbers i n sq u a r e s must be d i f f e r e n t from each ot h e r
46 a l l d i f f ( a0 , a1 , b0 , b1 ) . %top l e f t squ ar e
47 a l l d i f f ( a2 , a3 , b2 , b3 ) . %top r i g h t sq ua re
48 a l l d i f f ( c0 , c1 , d0 , d1 ) . %bottom l e f t s qu ar e
49 a l l d i f f ( c2 , c3 , d2 , d3 ) . %bottom r i g h t sq ua re
50
51 %i n i t i a l h i n t s
52 %b1 = 2 .
53 %b3 = 1 .
54 %c0 = 3 .
55 %c2 = 2 .
56
57 %i n i t i a l h i n t s − a l t e r n a t i v e problem
58 %b1 = 0 .
59 %b3 = 2 .
60 %c0 = 3 .
61 %c2 = 0 .
62
63 e n d o f l i s t .
Exercise 9.21 Look in Listing 9.4 and identify how the Sudoku constraints are modeled. Test
the example on two different set of clues, by commenting the clue lines appropriately.
Exercise 9.22 Extend the example to the 9×9 case and test it on the initial clues in [23] page
213.
Exercise 9.23 Model the exercise in Mace4. Does Mace4 find the same number of models as
the CSP solver?
68

9.4 Solutions to exercises
Solution to exercise 9.2
The constraint network appears in file simple3.xml. There is no solution in less than
five steps.
Solution to exercise 9.3
1. The constraint network appears in file different.xml. Arc consistency algorithm
does not reduce the domains of A, B or C. There are 3!= 6 solutions now.
2. There are 4 solutions now.
3. There are 2 solutions now.
4. With D
A
= D
B
= D
C
= {1, 2}, there is no solution. However, arc consistency is
not able to figure this out.
Solution to exercise 9.4
MRV will select the nodes in the middle, as they are the most restricted ones. Each of
these two nodes has six constraints. Least-constraining-value heuristic will put either 1
or 8, as these values rules out the fewest choices for the neighboring variables. Both of
them have only one consecutive number in the given domain. With the above heuristics,
a solution is found without backtracking.
Solution to exercise 9.6
There are two solutions: 1) A = B = C = D = true and 2) A + B + C + true, D = false.
Follow the steps at http://www.aispace.org/exercises/exercise4-b-1.shtml.
Solution for exercise 9.14: 92
69

Solution for exercise 9.17:
Listing 9.5: SEND+MORE
1 s e t ( ar i t h m e t i c ) .
2 a s s i g n ( domain s iz e , 1 0 ) . % domain i s {0 , 1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9 }.
3
4 l i s t ( d i s t i n c t ) . %d i s t i n c t l e t t e r s f o r d i s t i n c t d i g i t s
5
6 [D, E,M, N,O, R, S ,Y ] . % s e t o f a l l l e t t e r s
7
8 e n d o f l i s t .
9
10 for mu l as ( as sumptions ) .
11
12 1000 ∗ S + 100 ∗ E + 10 ∗ N + D +
13 1000 ∗ M + 100 ∗ O + 10 ∗ R + E =
14 10000 ∗ M + 1000 ∗ O + 100 ∗ N + 10 ∗ E + Y.
15
16 % Leading z e r o s not a ll o we d
17 S != 0 .
18 M != 0 .
19
20 e n d o f l i s t .
Solution for exercise 9.18: see file SEND MOST MONEY.in
Solution for exercise 9.20: see file ZWEI VIER VIER VIERZIG VIERZIG NEUNZIG.in
70

Chapter 10
Classical planning
We focus here on classical planning: offline (static), discrete, deterministic, fully observable,
single-agent, sequential (plans are sequences of actions), domain-independent. Planners use a
model of an application domain (such as blocks world) and a description of a specific problem
(initial state and goals) to compute a plan.
Learning objectives for this week are:
1. To write STRIPS domains in Planning Domain Definition Language.
2. To get used with the Fast Downward planning system.
10.1 Planning domains
Benchmark domains in planning have been continuously used in International Planning Com-
petitions [5]. Classical examples (such as Assembly, Blocks, Grid, Gripper, Hanoi, Logis-
tics, Travel Salesman, Tire-world) are described at https://fai.cs.uni-saarland.de/hoffmann/ff-
domains.html, while more modern ones (such as Parking, CityCar, Barman, Genome) at
https://helios.hud.ac.uk/scommv/IPC-14/domains.html. We restrict here to three planning
domains: sliding tiles, blocks world and the gripper robot.
Sliding-tiles puzzle
The domain contains tiles that should be slided from a start position to a goal one, as depicted
in Figure 10.1. The sliding-tile domain in listing 10.1 contains four predicates and one
action. The position of a tile is formalised by predicate (tile-at ?tile ?row ?col). Blank
position is encoded by (is-blank ?row ?col). The grid is encoded with (next-row ?r1 ?r2)
and (next-column ?c1 ?c2). The move-tile-down action has four parameters: the ?tile
which is moved from the current row ?old-row to next row ?new-row, and the column ?col.
The preconditions check if the new position is blank. In that case, two facts are removed from
Figure 10.1: Sliding-tiles puzzle.
71

Figure 10.2: Blocks world domain.
the current state (current tile position and current blank) and two new facts are added (the
new tile position and new blank).
Listing 10.1: Example of Sliding-Tiles puzzle.
1 ( define (domain s l i d i n g −t i l e )
2 ( : predicates
3 ( t i l e −at ? t ? r ? c )
4 ( is −blank ? r ? c )
5 ( next−row ? r1 ? r2 )
6 ( next−column ? c1 ? c2 ) )
7 ( : action move−t i l e −down
8 : parameters ( ? t i l e ? old−row ?new−row ? c o l )
9 : precondition (and ( next−row ? old−row ?new−row )
10 ( t i l e −at ? t i l e ? old−row ? c o l )
11 ( i s −blank ?new−row ? c o l ) )
12 : e f f e c t (and ( not ( t i l e −at ? t i l e ? old−row ? c o l ) )
13 ( not ( i s −blank ?new−row ? c o l ) )
14 ( t i l e −at ? t i l e ?new−row ? c o l )
15 ( i s −blank ? old−row ? c o l ) ) )
Exercise 10.1 Following the model in listing 10.1, define three actions: move-tile-up,
move-tile-right, and move-tile-left.
Blocks world
The domain contains blocks that need to be re-assembled on a table with unlimited space.
Basic model uses three actions: 1) moving a block from the table to another block, 2) moving a
block from another block to the table, 3) moving a block from another block to another block.
Listing 10.2: Example of the blocks world.
1 ( define (domain b l o ck s w o r ld )
2 ( : predicates ( c l e a r ?x )
3 ( on−t a b l e ?x )
4 ( on ?x ?y ) )
5 ( : action move−b−to−b
6 : parameters (?bm ? b f ? bt )
7 : precondition (and ( c l e a r ?bm) ( c l e a r ? bt ) ( on ?bm ? b f ))
8 : e f f e c t (and ( not ( c l e a r ? bt ) ) ( not ( on ?bm ? bf ) )
9 ( on ?bm ? bt ) ( c l e a r ? bf ) ) )
The formalisation in listing 10.2 uses three predicates: (clear ?x) checks if block ?x is
clear, (on-table ?x) verifies if block ?x is on table, while (on ?x ?y)) if block ?x is on block
?y. The action in lines 5-9 moves a block ?bm from the top of another block ?bf on a new
block ?bt. As preconditions, the block to move should not have anything above, that is (clear
72

Figure 10.3: Gripper domain.
?bm). Similarly for the block ?bt: (clear ?bt). The third precondition (on ?bm ?bf) forces
?bm to be on top of ?bf. If preconditions are meet, there are two negative effects and two
positive effects. Negative effects remove two facts from the successor state: the new block is
no longer clear (not (clear ?bt)), while ?bm is no longer on top of ?bf. Positive effects add
two facts to the successor state: ?bm is on top of ?bt, and ?bf become clear.
Exercise 10.2 Following the model in listing 10.2, define the actions move-b-to-t that moves
a block from another block to table, respectively move-t-to-b that moves a block from the table
on another block.
Gripper
A robot moves a set of balls between two rooms (Fig. 10.3). Two gripers are used to grip two
balls at the time. There are only three actions: move, pick, and drop.
Listing 10.3: Example of the gripper domain.
1 ( define (domain g r ip p e r −s t r i p s )
2 ( : predicates ( room ? r )
3 ( b a l l ?b )
4 ( g r i p p e r ? g )
5 ( at−robby ? r )
6 ( at ?b ? r )
7 ( f r e e ? g )
8 ( ca r r y ?o ?g ) )
9
10 ( : action move
11 : parameters (? from ? to )
12 : precondition (and ( room ? from ) ( room ? to ) ( at−robby ? from ) )
13 : e f f e c t (and ( at−robby ? to )
14 ( not ( at−robby ? from ) ) ) )
15
16
17
18 ( : action p i ck
19 : parameters (? ob j ?room ? g r i p p e r )
20 : precondition (and ( b a l l ? o bj ) ( room ?room ) ( g r i p p e r ? g r i p p e r )
Action move moves the robot from the room ?from to the room ?to under the condition that
the robot is located in room ?from, given by (at-robby ?from). Action pick checks if a ball
?b lays in the same room ?room with the robot and the robot has a free gripper. The positive
effect asserts that the gripper carries the object (carry ?obj ?gripper). The negative effects
state that the object is no longer in the location (not (at ?obj ?room)), and the gripper is
no longer free (not (free ?gripper)).
73

Exercise 10.3 Following the model in listing 10.3, define the action drop with three parameters
?obj, ?room, ?gripper.
As you have already noted, we used a specific language to formalise planning domains. This
is the Planning Domain Definition Language.
10.2 Planning Domain Definition Language
Planning Domain Definition Language (PDDL) is the input language of most planning tools.
The PDDL language supports many different levels of expressivity starting with STRIPS (STan-
ford Research Institute Problem Solver) or ADL (Action Description Language). For instance,
STRIPS allows only specifications of preconditions (what must be established before the ac-
tion is performed) and postconditions (what is established after the action is performed). ADL
extends STRIPS with types, negative preconditions, disjunctive preconditions, equality, quanti-
fied preconditions or conditional effects. Recent formalisations include durative actions, fluents,
preferences, functions. As each planner implements only a subset of PDDL, attention is needed
when modelling a domain for a particular planning tool. For the BNF description of PDDL3.0
consult [6].
Planning tasks formalised in PDDL are separated into two files: domain and problem to
solve. The domain file specifies the predicates and available actions (see listing 10.4).
Listing 10.4: Syntax for a PDDL domain.
1 ( define (domain DOMAIN NAME)
2 ( : requirements [ : s t r i p s ] [ : e q u a l i t y ] [ : ty pi ng ] [ : ad l ] . . . )
3 [ ( : types T1 T2 T3 T4 . . . ) ]
4 ( : predicates (PREDICATE 1 NAME [ ? A1 ?A2 . . . ?AN] )
5 (PREDICATE 2 NAME [ ? A1 ?A2 . . . ?AN] )
6 . . . )
7
8 ( : action ACTION 1 NAME
9 [ : parameters ( ? P1 ?P2 . . . ?PN) ]
10 [ : precondition PRECOND FORMULA]
11 [ : e f f e c t EFFECT FORMULA] ) )
The problem definition specifies which domain it belongs to, the existing objects in the
problem instance, the initial state of the world, and the goal (see listing 10.5).
Listing 10.5: Syntax for a PDDL problem.
1 ( define ( problem PROBLEM NAME)
2 ( : domain DOMAIN NAME)
3 ( : objects OBJ1 OBJ2 . . . OBJ N)
4 ( : i n i t ATOM1 ATOM2 . . . ATOM N)
5 ( : goal CONDITION FORMULA) )
As an example, the eight-puzzle problem in listing 10.6 starts by specifying the domain
needed to solve the problem. The objects are represented by eight tiles, three rows and three
columns. The initial state specifies the grid (i.e., next-row row1 row2)) and position of each
tile (i.e., (tile-at tile8 row1 col1)). The goal’s state uses the operator and to specify a
conjunction of facts that should be true.
Listing 10.6: Example of a problem for the Sliding-Tiles domain.
1 ( define ( problem ei g h t −pu z z l e )
2 ( : domain s l i d i n g −t i l e )
3 ( : objects
4 t i l e 1 t i l e 2 t i l e 3 t i l e 4 t i l e 5 t i l e 6 t i l e 7 t i l e 8
74

5 row1 row2 row3
6 c o l 1 c o l 2 c o l 3 )
7 ( : i n i t
8 ( next−row row1 row2 ) ( next−column c o l 1 c o l 2 )
9 ( next−row row2 row3 ) ( next−column c o l 2 c o l 3 )
10 ( t i l e −at t i l e 8 row1 c o l 1 ) ( t i l e −at t i l e 4 row2 c o l 2 )
11 ( t i l e −at t i l e 7 row1 c o l 3 ) ( t i l e −at t i l e 3 row2 c o l 1 )
12 ( t i l e −at t i l e 6 row1 c o l 2 ) ( t i l e −at t i l e 2 row3 c o l 1 )
13 ( t i l e −at t i l e 5 row2 c o l 3 ) ( t i l e −at t i l e 1 row3 c o l 2 )
14 ( i s −blank row3 c o l 3 ) )
15 ( : goal
16 (and
17 ( t i l e −at t i l e 1 row1 c o l 1 ) ( t i l e −at t i l e 2 row1 c o l 2 )
18 ( t i l e −at t i l e 3 row1 c o l 3 ) ( t i l e −at t i l e 4 row2 c o l 1 )
19 ( t i l e −at t i l e 5 row2 c o l 2 ) ( t i l e −at t i l e 6 row2 c o l 3 )
20 ( t i l e −at t i l e 7 row3 c o l 1 ) ( t i l e −at t i l e 8 row3 c o l 2 ) ) ) )
Exercise 10.4 For the domain in listing 10.1, define the problem illustrated in Fig. 10.1.
Exercise 10.5 For the domain in listing 10.2, define the problem illustrated in Fig. 10.2.
Exercise 10.6 For the domain in listing 10.3, define the problem illustrated in Fig. 10.3.
10.3 Fast Downward planner
Fast Downward (FD) is a platform for implementing and evaluating planning algorithms.
Among many running options provided by FD [9], we limit here to the two most relevant:
the search algorithm and the heuristic that guides the search. With these two parameters, the
usual call is:
1 . / fd Domain . pddl Problem . pddl \
2 −−h e u r i s t i c ”h=f f ( ) ” \
3 −−s e a r c h ” a s t a r (h )”
FD gets the domain and the planning problem to be solved in PDDL syntax. In the above
example, A
∗
algorithm with the ff() heuristic are used to compute a plan. The plan is saved
in files named sas.plan.1.
Exercise 10.7 Generate by hand the plan for problem in Fig. 10.1. Does FD planner compute
the same plan?
Exercise 10.8 Run the FD planner for the 8-sliding tiles domain with various init and goal
states. Extend the problem to 15-tiles, that is 4 rows and 4 columns.
Exercise 10.9 Run the FD planner for the blocks world domain with various init and goal
states.
Exercise 10.10 Run the FD planner for the gripper domain with various init and goal states.
Exercise 10.11 Model the Wumpus world in PDDL. Used FD planner to generate plans for
the three problems in figure 10.4. Assume that the environment is fully observable.
75

Figure 10.4: Modelling Wumpus world in PDDL.
10.4 Solutions to exercises
Solution to exercise 10.1
1 ( : action move−t i l e −up
2 : parameters (? t i l e ? old−row ?new−row ? c o l )
3 : precondition (and ( next−row ?new−row ? old−row )
4 ( t i l e −at ? t i l e ? old−row ? c o l )
5 ( i s −blank ?new−row ? c o l ) )
6 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? old−row ? c o l ) )
7 (not ( i s −blank ?new−row ? c o l ) )
8 ( t i l e −at ? t i l e ?new−row ? c o l )
9 ( i s −blank ? old−row ? c o l ) ) )
10
11 ( : action move−t i l e −r i g h t
12 : parameters (? t i l e ? row ? old−c o l ?new−c o l )
13 : precondition (and ( next−column ? old−c o l ?new−c o l )
14 ( t i l e −at ? t i l e ?row ? old−c o l )
15 ( i s −blank ?row ?new−c o l ) )
16 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? row ? old−c o l ) )
17 (not ( i s −blank ?row ?new−c o l ) )
18 ( t i l e −at ? t i l e ?row ?new−c o l )
19 ( i s −blank ?row ? old−c o l ) ) )
20
21 ( : action move−t i l e −l e f t
22 : parameters (? t i l e ? row ? old−c o l ?new−c o l )
23 : precondition (and ( next−column ?new−c o l ? old−c o l )
24 ( t i l e −at ? t i l e ?row ? old−c o l )
25 ( i s −blank ?row ?new−c o l ) )
26 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? row ? old−c o l ) )
27 (not ( i s −blank ?row ?new−c o l ) )
28 ( t i l e −at ? t i l e ?row ?new−c o l )
29 ( i s −blank ?row ? old−c o l ) ) )
76

Solution to exercise 10.2
1 ( : action move−b−to−t
2 : parameters (?bm ? bf )
3 : precondition (and ( c l e a r ?bm) ( on ?bm ? b f ) )
4 : e f f e c t (and ( not ( on ?bm ? bf ) )
5 ( on−t a b l e ?bm) ( c l e a r ? bf ) ) )
6
7 ( : action move−t−to−b
8 : parameters (?bm ? bt )
9 : precondition (and ( c l e a r ?bm) ( c l e a r ? bt ) ( on−t a b l e ?bm) )
10 : e f f e c t (and ( not ( c l e a r ? bt ) ) ( not ( on−t a b l e ?bm) )
11 ( on ?bm ? bt ) ) ) )
Solution to exercise 10.3
1 ( : action drop
2 : parameters (? obj ?room ? g r i p p e r )
3 : precondition (and ( b a l l ? o bj ) ( room ?room ) ( g r i p p e r ? g r i p p e r )
4 ( ca r r y ? ob j ? g r i p p e r ) ( at−robby ?room ) )
5 : e f f e c t (and ( at ? obj ?room )
6 ( f r e e ? g r i p p e r )
7 ( not ( ca r r y ? o bj ? g r i p p e r ) ) ) ) )
Solution to exercise 10.4
1 ( define ( problem ei g h t −puzz le −from−f i g u r e )
2 ( : domain s l i d i n g −t i l e )
3 ( : objects
4 t i l e 1 t i l e 2 t i l e 3 t i l e 4 t i l e 5 t i l e 6 t i l e 7 t i l e 8
5 row1 row2 row3
6 c o l 1 c o l 2 c o l 3 )
7 ( : i n i t
8 ( next−row row1 row2 ) ( next−column c o l 1 c o l 2 )
9 ( next−row row2 row3 ) ( next−column c o l 2 c o l 3 )
10 ( t i l e −at t i l e 1 row1 c o l 1 ) ( t i l e −at t i l e 8 row2 c o l 2 )
11 ( t i l e −at t i l e 2 row1 c o l 2 ) ( t i l e −at t i l e 5 row2 c o l 3 )
12 ( t i l e −at t i l e 3 row1 c o l 3 ) ( t i l e −at t i l e 7 row3 c o l 1 )
13 ( t i l e −at t i l e 4 row2 c o l 1 ) ( t i l e −at t i l e 6 row3 c o l 2 )
14 ( i s −blank row3 c o l 3 ) )
15 ( : goal
16 (and
17 ( t i l e −at t i l e 1 row1 c o l 1 ) ( t i l e −at t i l e 2 row1 c o l 2 )
18 ( t i l e −at t i l e 3 row1 c o l 3 ) ( t i l e −at t i l e 4 row2 c o l 1 )
19 ( t i l e −at t i l e 5 row2 c o l 2 ) ( t i l e −at t i l e 6 row2 c o l 3 )
20 ( t i l e −at t i l e 7 row3 c o l 1 ) ( t i l e −at t i l e 8 row3 c o l 2 ) ) ) )
Solution to exercise 10.5
1 ( define ( problem blo ck s −4)
2 ( : domain bl o c k s )
3 ( : objects a b c d )
4 ( : i n i t ( c l e a r d ) ( c l e a r b )
5 ( on−t a b l e c ) ( on−t a b l e a )
6 ( on d c ) ( on b a ) )
7 ( : goal (and ( on a b ) ( on b c ) ( on c d ) ) ) )
77

Solution to exercise 10.6
1 ( define ( problem gr i p p er −7)
2 ( : domain g r ipp e r −s t r i p s )
3 ( : objects rooma roomb b1 b2 b3 b4 b5 b6 b7 l e f t r i g h t )
4 ( : i n i t ( room rooma ) ( room roomb )
5 ( g r i p p e r l e f t ) ( gr i p p e r r i g h t )
6 ( b a l l b1 ) ( b a l l b2 ) ( b a l l b3 )
7 ( b a l l b4 ) ( b a l l b5 ) ( b a l l b6 ) ( b a l l b7 )
8 ( at−robby rooma )
9 ( f r e e l e f t ) ( f r e e r i g h t )
10 ( at b1 rooma ) ( at b2 rooma )
11 ( at b3 rooma ) ( at b4 rooma )
12 ( at b5 rooma ) ( at b6 rooma ) ( at b7 rooma ) )
13 ( : goal (and ( at b1 roomb ) ( at b2 roomb )
14 ( at b3 rooma ) ( at b4 roomb )
15 ( at b5 roomb ) ( at b6 roomb ) ( at b7 roomb ) ) ) )
Solution to exercise 10.7.
With
./fd LAB/puzzle − simple.pddlLAB/tiles p01.pddl
--heuristic "h=ff()"
--search "astar(h)"
the plan has 4 steps:
move-tile-right tile6 row3 col2 col3 (1)
move-tile-down tile8 row2 row3 col2 (1)
move-tile-left tile5 row2 col3 col2 (1)
move-tile-up tile6 row3 row2 col3 (1)
Plan length: 4 step(s).
Plan cost: 4
Initial state h value: 6.
78

Chapter 11
Heuristics for planning
Heuristics are used to guide the search in large state spaces.
Learning objectives for this week are:
1. To investigate the role of heuristics in searching for a plan.
2. To assign costs to each action.
3. To decide on your own running scenario related to planning.
11.1 Defining heuristics by relaxation
Consider that the eight-sliding-tiles domain and the problem depicted in Fig. 10.1 are located
in folder LAB.
1 . / fd $LAB/ pu zz le −s im p le . pddl $LAB/ t i l e s p 0 2 . pddl \
2 −−h e u r i s t i c ”h=f f ( ) ” \
3 −−s e a r c h ” a s t a r (h )”
Here, tiles p02.pddl is the problem in listing 10.6. The resulted plan partially appears
in listing 11.1. Note that the initial estimation of f = 26 steps is exact - the computed plan
has indeed 26 steps. The cost of the plan is the same with its length, because each action has
a default cost value of 1.
Listing 11.1: Plan generated by the FastDownward planner with A
∗
and ff.
1 move−t i l e −down t i l e 5 row2 row3 c o l 3 ( 1 )
2 move−t i l e −down t i l e 7 row1 row2 c o l 3 ( 1 )
3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 move−t i l e −l e f t t i l e 8 row3 c o l 3 c o l 2 ( 1 )
5 Plan l e n g t h : 26 s t e p ( s ) .
6 Plan c o s t : 26
7 I n i t i a l s t a t e h va l ue : 2 6 .
A more costly solution is obtained with a modified version of A
∗
, called Weighted A
∗
(W A
∗
):
1 . / fd $LAB/ pu zz le −s im p le . pddl $LAB/ t i l e s p 0 2 . pddl \
2 −−h e u r i s t i c ”h=f f ( ) ” \
3 −−se a r c h ” a s t a r ( weight ( h , 3) ) ”
The obtained plan has 40 steps. The initial estimated cost was f = 78, given by f = g +w ·h =
0 + 3 · 26.
79

Exercise 11.1 Which is the length of the plan generated with ff heuristic and W A
∗
with
w = 2?
Now consider that some tiles are glued in place and cannot be moved. To handle this,
moving actions should additionally check in the preconditions that the tile is not glued, given
by (not (glued ?tile)) in listing 11.2.
Listing 11.2: In the glued-sliding-tiles actions additionally check if the the tiles are not glued.
1 ( : action move−t i l e −down
2 : parameters (? t i l e ? old−row ?new−row ? c o l )
3 : precondition (and ( i s −t i l e ? t i l e )
4 ( not ( g lu ed ? t i l e ) )
5 ( i s −row ? old−row )
6 ( i s −row ?new−row )
7 ( i s −column ? c o l )
8 ( next−row ? old−row ?new−row )
9 ( t i l e −at ? t i l e ? old−row ? c o l )
10 ( i s −blank ?new−row ? c o l ) )
11 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? old−row ? c o l ) )
12 (not ( i s −blank ?new−row ? c o l ) )
13 ( t i l e −at ? t i l e ?new−row ? c o l )
14 ( i s −blank ? old−row ? c o l ) ) )
Consider the glued-fifteen-puzzle task [17].
1 $ . / fd t i l e / g lu ed . pddl t i l e / gl ued 01 . pddl \
2 −−h e u r i s t i c ”h=cg ( ) ” \
3 −−se a r c h ” e a g e r g r e e d y ( h , p r e f e r r e d=h)”
Note that a cg() heuristic is used instead of ff(), and the eager-greedy algorithm instead of
A
∗
. A plan of 1987 steps is computed.
Now consider that you can remove tiles from the frame and reinsert them at any blank
location. The remove-tile-from-frame action has three effects: i) the tile is removed from
its position, ii) that position becomes blank, and iii) the tile is not outside the frame. Note in
listing 11.3 the new predicate (is-outside-frame ?tile).
Listing 11.3: In the cheating-tile domain tiles can be removed from the frame.
1 ( : action remove−t i l e −from−frame
2 : parameters (? t i l e ? row ? c o l )
3 : precondition (and ( i s −t i l e ? t i l e )
4 ( i s −row ?row )
5 ( i s −column ? c o l )
6 ( t i l e −at ? t i l e ?row ? c o l ) )
7 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? row ? c o l ) )
8 ( i s −blank ?row ? c o l )
9 ( i s −ou t s i de −frame ? t i l e ) ) )
Exercise 11.2 Following the model in listing 11.3, extend the sliding tiles domain with the
action insert-tile-into-frame with three parameters: ?tile, ?row, ?column.
Exercise 11.3 Find yourself a plan for the problem in file cheating p01.pddl. Does FD
planner compute the same plan?
By running FD on the cheat.pddl domain [17] with the problem in Fig 10.1
1 . / fd $LAB/ ch ea t . pddl $LAB/ ch e a th i n g p 0 1 . pddl \
2 −−h e u r i s t i c ”h=cg ( ) ” \
3 −−se a r c h ” a s t a r (h )”
80

the following plan is obtained:
Listing 11.4: Plan computed for the cheating domain.
1 remove−t i l e −from−frame t i l e 8 row2 c o l 2 ( 1 )
2 move−t i l e −l e f t t i l e 5 row2 c o l 3 c o l 2 ( 1 )
3 remove−t i l e −from−frame t i l e 6 row3 c o l 2 ( 1 )
4 i n s e r t −t i l e −in to −frame t i l e 6 row2 c o l 3 ( 1 )
5 i n s e r t −t i l e −in to −frame t i l e 8 row3 c o l 2 ( 1 )
6 Plan l e n g t h : 5 s t e p ( s ) .
7 Plan c o s t : 5
8 I n i t i a l s t a t e h va l ue : 6 .
Exercise 11.4 Can you obtain a better plan with FD?
11.2 Search engines and heuristics in the Fast Downward
planner
Search engines
Three search algorithms used by FD are detailed next: Astar, Weighted A*, and enforced hill
climbing.
Astar. A
∗
firstly expands nodes with the lowest cost function f = g + h. If several nodes
have the same f-cost, A* must implement some tiebreaking policy. One such policy is to favor
of nodes with least h-estimation. This is also indicated by the following call:
1 −−h e u r i s t i c h=e va l u a t o r
2 −−se a r c h ea g e r ( t i e b r e a k i n g ( [ sum ( [ g ( ) , h ] ) , h ] , u n sa f e p r u n i n g=f a l s e ) ,
3 r e o p e n c l o s e d=true , f e v a l=sum ( [ g ( ) , h ] ) )
In the call above, the tiebreaking mechanism uses a list of two elements. If a node has the
same sum for g() and h, the node with the lowest h is expanded. The above call is equivalent
to fd --search astar(evaluator).
Exercise 11.5 FD’s tiebreaking strategy for A* is [h, fifo]. Here, the 2nd-level tiebreaking
is fifo. However, [1] has reported that [h, lifo] outperforms [h, fifo]. Run some experi-
ments on tiebreaking strategies for A
∗
. Do you tend to confirm the results reported in [1]?
Generic call for A
∗
is:
1 a s t a r ( eva l , mpd=f a l s e , pruning=n u l l ( ) , c o s t \ ty p e=NORMAL,
2 bound=i n f i n i t y , max\ t im e=i n f i n i t y )
Operations on evaluators (such as max, sum, or weight) can be applied: max(evals),
sum(evals), weight(eval, w(int)). Here evals is a list of evaluators.
Weighted A*. (W A
∗
) interpolates between A
∗
and greedy by applying BFS with the cost
function f(n) = (1−α)·g(n)+α ·h(n), where α ∈ [0, 1]. FD uses the alternative representation
obtained by replacing α with
w
w+1
, where w ≥ 1:
f(n) = g(n) + w · h(n)
A possible call is lazy wastar(evals, w=2). Note that for w = 0 we have uniform-cost search,
while for w = 1 we have A
∗
.
81

Enforced hill climbing. Recall that hill climbing randomly selects the best successor to
each state and restarts are needed when a path became too long. Instead, enforced form of hill
climbing (EHC)[11] exploits both local and global search. EHC evaluates all direct successors
of the current state s. If none of these successors has a better heuristic value, EHC looks at the
successor’s successors. This local search process ends when a state s
0
with h
F F
(s
0
) < h
F F
(s) is
found. The path to s
0
is added to the current plan, and search continues with s
0
as the new
starting state. Thus, each search iteration performs complete breadth-first search for a state
with strictly better evaluation.
Heuristics in the FD planner
The following heuristics use a relaxed version of the problem in which the negative effects
(delete list) for each applicable action is removed. The effect is that once an atom is achieved,
it stays achieved.
Max (h
max
)
h
max
is the maximum of the accumulated costs of the paths to the goal in the relaxed problem.
h
max
is admissible,
Additive (h
add
)
h
add
is the sum of the costs needed to achieve each subgoal in the goal G. h
add
computes the
cost c(s, g) to reach each proposition g ∈ G from the state s and then sums the costs. The cost
of each proposition g is determined by the index of the first layer in which it appears. h
add
is
not admissible.
Goal count (h
gc
)
h
gc
counts the number of unachieved goals. h
gc
is neither admissible nor consistent.
Fast forward (h
ff
)
At AIPS-2000
1
, Fast Forward (FF) planner outperformed all the other fully automatic systems.
This distinguished performance was due to its h
ff
heuristic. FF uses forward search guided
by the “ignoring delete list” relaxation. The value h
ff
(s) is the number of actions needed to
achieve the goal from state s when assuming the delete lists are all empty. Differently for h
add
and h
max
, h
ff
actually solves the relaxed problem.
Finding a solution for the relaxed problem depends on the implementation of the h
ff
al-
gorithm. However, computing optimal relaxed solution length is NP hard. The trick is to use
Graphplan algorithm [4] that finds a reasonable plan in polynomial time, but with no guarantee
that the solution is optimal. After running a relaxed version of Graphplan, the length of the
generated plan is used for h
ff
evaluation.
With a heuristic function computed in polynomial time, the difficulty is now on the number
of states for each h
ff
needs to be computed. Hoping to reach the goal by evaluating few states
as possible, an option is hill climbing. h
ff
uses an enforced form of hill climbing [11] with a
prunning strategy called ”helpful actions“. h
ff
considers helpful only those applicable actions
that add at least one goal at the lowest layer of the relaxed solution. The successors of any state
s in breadth-first search are actually restricted to Helpful(s). This ”helpful action” pruning
1
http://www.cs.toronto.edu/aips2000/
82

does not preserve completeness. That’s why, when a solution is not found, one can simply
switch to a WA* algorithm, that is complete.
For other heuristics such as the Causal Graph heuristic (h
cg
), the eager student is referred
to [8] where it was firstly introduced. The heuristic has been later generalised to Context-
Enhanced Additive heuristic (h
cea
) [10].
Combination of heuristics
FD allows combination of heuristics through operators such as max(h1,h2) or sum(h1,h2).
Note that maximum of admissible heuristics is admissible. Sum yields a stronger heuristic, but
not necessarily admissible.
Some predefined combination of heuristics are saved as aliases in the src/driver/aliases.py
module. For instance, the seq-sat-lama-2011 configuration can be run with:
1 . / fd −−a l i a s seq−s at−lama −2011 misc / t e s t s / benchmarks/ g r i p p e r /prob01 . pddl
To see all available aliases run:
1 . / f a s t −downward . py −−show−a l i a s e s
Exercise 11.6 Run FD planner on the 8-sliding-tiles problem depicted in figure 3.4, page 71,
AIMA 3rd edition.
1. Which is the length of the optimal plan?
2. Play with the FD options to obtain the optimal plan or a plan close to it. Write the length
of the obtained plan and the running parameters.
3. Identify the best plan obtained by one of your colleagues. Write the running parameters
for this case.
11.3 Introducing costs to actions
FD planner supports :action-costs requirement from PDDL 3.1. Consider the domain in
listing 11.5. Note that :requirements include the action costs. Two functions are defined:
weight with one parameter (that is a tile) and total cost. The increase keyword is used to
update the cost of an action.
Listing 11.5: Sliding tiles domain with costs.
1 ( define (domain weighted−s l i d i n g −t i l e )
2
3 ( : requirements : s t r i p s : action−c o s t s )
4
5 ( : predicates
6 ( next−row ? r1 ? r2 )
7 ( next−column ? c1 ? c2 )
8 ( t i l e −at ? t ? r ? c )
9 ( i s −blank ? r ? c ) )
10
11 ( : f u n c t i o n s
12 (WEIGHT ? t ) − number
13 ( t o t a l −c o s t ) − number )
14
15 ( : action move−t i l e −down
16 : parameters (? t i l e ? old−row ?new−row ? c o l )
83

17 : precondition (and ( next−row ? old−row ?new−row )
18 ( t i l e −at ? t i l e ? old−row ? c o l )
19 ( i s −blank ?new−row ? c o l ) )
20 : e f f e c t (and ( not ( t i l e −a t ? t i l e ? old−row ? c o l ) )
21 (not ( i s −blank ?new−row ? c o l ) )
22 ( t i l e −at ? t i l e ?new−row ? c o l )
23 ( i s −blank ? old−row ? c o l )
24 ( i n c r e a s e ( to t a l −c o s t ) (WEIGHT ? t i l e ) ) ) )
25 )
Assume that the odd tiles are somehow more difficult to be moved. In listing 11.6, odd tiles
have a cost of 2 while even tiles a cost of 1.
Listing 11.6: Assigning costs to each tile: odd tiles are difficult to move.
1 ( define ( problem 8−puzzle −with−c o s t s )
2 ( : domain weighted−s l i d i n g −t i l e )
3 ( : objects
4 t i l e 1 t i l e 2 t i l e 3 t i l e 4 t i l e 5 t i l e 6 t i l e 7 t i l e 8
5 row1 row2 row3 c o l 1 c o l 2 c o l 3 )
6
7 ( : i n i t
8 ( next−row row1 row2 ) ( next−row row2 row3 )
9 ( next−column c o l 1 c o l 2 ) ( next−column c o l 2 c o l 3 )
10 ( t i l e −at t i l e 8 row1 c o l 1 ) ( t i l e −at t i l e 6 row1 c o l 2 )
11 ( t i l e −at t i l e 4 row1 c o l 3 ) ( t i l e −at t i l e 5 row2 c o l 1 )
12 ( t i l e −at t i l e 7 row2 c o l 2 ) ( t i l e −at t i l e 2 row2 c o l 3 )
13 ( t i l e −at t i l e 3 row3 c o l 1 ) ( t i l e −at t i l e 1 row3 c o l 2 )
14 ( i s −blank row3 c o l 3 )
15
16 (= ( t o t a l −c o s t ) 0)
17
18 ; ; Odd t i l e s a r e d i f f i c u l t t o s l i d e .
19 (= (WEIGHT t i l e 1 ) 2) (= (WEIGHT t i l e 2 ) 1 )
20 (= (WEIGHT t i l e 3 ) 2) (= (WEIGHT t i l e 4 ) 1 )
21 (= (WEIGHT t i l e 5 ) 2) (= (WEIGHT t i l e 6 ) 1 )
22 (= (WEIGHT t i l e 7 ) 2) (= (WEIGHT t i l e 8 ) 1 )
23 )
24
25 ( : goal (and ( i s −blank row1 c o l 1 ) ) )
26
27 ( : m et r ic minimize ( t o t a l −c o s t ) )
28 )
Exercise 11.7 Solve the problem in listing 11.6 by hand. Which is the cost of your plan? Ask
FD to compute a plan with minimum cost.
Exercise 11.8 Consider that tile4 is almost glued. You need 7 tries to slide it. That is, its
cost is 7. Does FD is able to find the optimal plan in this case?
Exercise 11.9 Consider that the shoot(arrow) action in the Wumpus world has a cost of 10.
Which is the minimum cost plan computed by Fd for the third problem in Figure 10.4?
11.4 Modelling planning domains
Your task is to model a planning domain in PDDL. You can either extend a given domain, or
write one from scratch. You should also create several problems for your domain, and verify
84

that at least one planning engine can solve them. Feel free to use ADL features (conditional
effects, quantified preconditions, etc.) as long as these features are supported by your planner.
You might want to validate the obtained plans with the validator tool. Then you will conduct
empirical investigation of the performance of different planning engines and heuristics, using the
domain you created in the first part. To do this, you will create a set of problems of increasing
size and complexity, and you will measure runtime. You will identify some parameters that you
can use to increase problem’s complexity (like number of objects in the init state or number
of predicates in the goal. Next, you will create problems for your domain by scaling up your
parameters. Feel free to use your favorite programming language to automatically generate this
experimental problems. During experiments, it is reasonable to set a time limit between 5 and
10 minutes. Additionally, feel free to introduce some incomplete knowledge in the init state or
nondeterministic effects. You will see in the following chapter how to handle incompleteness
and non-determinism with conformant and contingent planning.
Browse the available repositories with the aim to find yourself an idea for an original domain.
Exercise 11.10 Investigate classical planning domains (such as Assembly, Blocks, Grid, Grip-
per, Hanoi, Logistics, Travel Salesman, Tire-world) described at
https://fai.cs.uni-saarland.de/hoffmann/ff-domains.html.
Exercise 11.11 Investigate modern planning domains (such as Parking, CityCar, Barman,
Genome) at https://helios.hud.ac.uk/scommv/IPC-14/domains.html.
Exercise 11.12 Investigate the domains from the ipc directory.
Action Description Language (ADL) extends STRIPS with:
• negative preconditions: robot can move a ball if it is NOT carrying anything.
• disjunctive preconditions: (you can travel by bus if you have a ticket or a season ticket
or you sent an SMS
• disjunctive goals: you want to have (on a b) or (on b a)
• conditional effects
You can enact full ADL expressivity using (:requirements :adl). An example of using
ADL appears in airport-adl.
A comprehensive set of planning domains can be obtained by querying the following API:
http://api.planning.domains/. You might find helpful the online PDDL editor provided by at
http://lcas.lincoln.ac.uk/fast-downward. Note that this editor does not allow you to change
the planner’s parameters.
Use the plan validator VAL (https://github.com/KCL-Planning/VAL) [14] to independently
verify that the generated plans are correct. VAL can automatically produce a LATEX report of
the plan validation. The report includes a step by step account of plan validation, plan repair
advice if necessary and Gantt charts.
1 $ v a l i d a t e −l domain . pddl p roblem . pddl plan . pddl
The Gantt chart shows the times over which actions are active, their duration, concurrent
activity and dependency.
1 . / v a l i d a t e −l t i l e / p u z z l e . pddl t i l e / pu z z le 0 1 . pddl s a s \ p l a n
85

Exercise 11.13 Identify a domain that you will formalise in PDDL. Start writing basic predi-
cates and actions. Use the bottom up approach: after writing a simple action, immediately test
it with appropriate init and goal states.
You might find useful the template in listing 11.7:
Listing 11.7: Template for modelling your scenario.
1 ( define (domain Template )
2 ( : requirements : s t r i p s : t yp in g : action−c o s t s : ad l )
3
4 ( : types type1 − o b j e c t )
5
6 ( : predicates ( pred0 ?x − type1 ))
7
8 ( : action a ct 1
9 : parameters (? x − type1 )
10 : precondition (and ( pred0 ?x ) )
11 : e f f e c t (and ( not ( pred0 ?x ) ) ) )
86

11.5 Solutions to exercises
Solution to exercise 11.1.
The plan has 32 steps, computed with:
./fd $LAB/puzzle-simple.pddl $LAB/tiles p02.pddl
--heuristic "h=ff()"
--search "astar(weight(h, 2))"
Solution to exercise 11.2.
1 ( : action i n s e r t −t i l e −into −frame
2 : parameters (? t i l e ? row ? c o l )
3 : precondition (and ( IS−TILE ? t i l e )
4 ( IS−ROW ?row )
5 ( IS−COLUMN ? c o l )
6 ( i s −o u t si d e −frame ? t i l e )
7 ( i s −blank ?row ? c o l ) )
8 : e f f e c t (and ( not ( i s −o u t s i de −frame ? t i l e ) )
9 (not ( i s −blank ?row ? c o l ) )
10 ( t i l e −at ? t i l e ?row ? c o l ) ) )
Solution to exercise 11.4
A plan of length four is obtained with A
∗
and ff.
./fd $LAB/cheat.pddl $LAB/cheating p01.pddl
--heuristic "h=ff()"
--search "astar(weight(h,1))"
The computed plan is:
remove-tile-from-frame tile6 row3 col2 (1)
move-tile-down tile8 row2 row3 col2 (1)
move-tile-left tile5 row2 col3 col2 (1)
insert-tile-into-frame tile6 row2 col3 (1)
Plan length: 4 step(s).
Plan cost: 4
Initial state h value: 7.
Solution to exercise 11.6
AIMA states that the solution is 26 steps long.
Solution to exercise 11.7
A plan of cost four is obtained with:
../fd LAB/weight
s
imple.pddlLAB/weight p01.pddl
--heuristic "h=ff()"
--search "eager greedy(h,preferred=h)"
The computed plan is:
move-tile-down tile2 row2 row3 col3 (1)
move-tile-down tile4 row1 row2 col3 (1)
move-tile-right tile6 row1 col2 col3 (1)
move-tile-right tile8 row1 col1 col2 (1)
87

Solution to exercise 11.8
A plan of cost five is obtained with:
../fd LAB/weight
s
imple.pddlLAB/weight p02.pddl
--heuristic "h=ff()"
--search "astar(h)"
The computed plan is:
move-tile-down tile2 row2 row3 col3 (1)
move-tile-right tile7 row2 col2 col3 (2)
move-tile-down tile6 row1 row2 col2 (1)
move-tile-right tile8 row1 col1 col2 (1)
88

Chapter 12
Planning and acting in the real world
When model real world domains, one should consider partial observability and nondetermin-
ism. For instance, the initial situation may be only partially specified or actions may have
nondeterministic effects. To handle these, we need conformant planning. Moreover, ability to
observe aspects of the current state is handled by contingent planning.
Learning objectives for this week are:
1. To model uncertain information into planning domains.
2. To formalise nondeterministic actions.
3. To include observations during plan execution.
12.1 Planning domains with uncertainty
Blocks world with partially observed init state. In blocks world, assume the uncertainty
is that the top n blocks on each initial stack are arranged in an unknown order (see listing 12.1).
Listing 12.1: Blocks world with uncertainty in the init state.
1 ( define (pro blem BW−rand −5)
2 ( : domain b l o ck s w o r l d )
3 ( : objects b1 b2 b3 b4 b5 )
4 ( : i n i t
5 ( on−t a b l e b1 ) ( on−t a b l e b2 ) ( on−t a b l e b4 )
6 ( c l e a r b2 ) ( c l e a r b4 )
7 ( unknown ( on b5 b1 ) ) ( unknown ( c l e a r b5 ) ) ( unknown ( on b5 b3 ) )
8 ( unknown ( on b3 b1 ) ) ( unknown ( c l e a r b3 ) ) ( unknown ( on b3 b5 ) )
9 ( or ( not ( on b5 b3 ) ) ( not ( on b3 b5 ) ) )
10 ( or ( not ( on b3 b5 ) ) ( not ( on b5 b3 ) ) )
11 ( on e of ( c l e a r b5 ) ( c l e a r b3 ) )
12 ( on e of ( on b5 b1 ) ( on b3 b1 ) )
13 ( on e of ( on b5 b1 ) ( on b5 b3 ) )
14 ( on e of ( on b3 b1 ) ( on b3 b5 ) )
15 ( on e of ( c l e a r b5 ) ( on b3 b5 ) )
16 ( on e of ( c l e a r b3 ) ( on b5 b3 ) ) )
17 ( : goal (and ( on b2 b5 ) ( on b4 b2 ) ( on b5 b1 ) ) ) )
Unknown construct expresses the set of all possible assignments to an object.
(oneof e1 . . . en ) indicates that exactly one of the ei effects will take place.
89
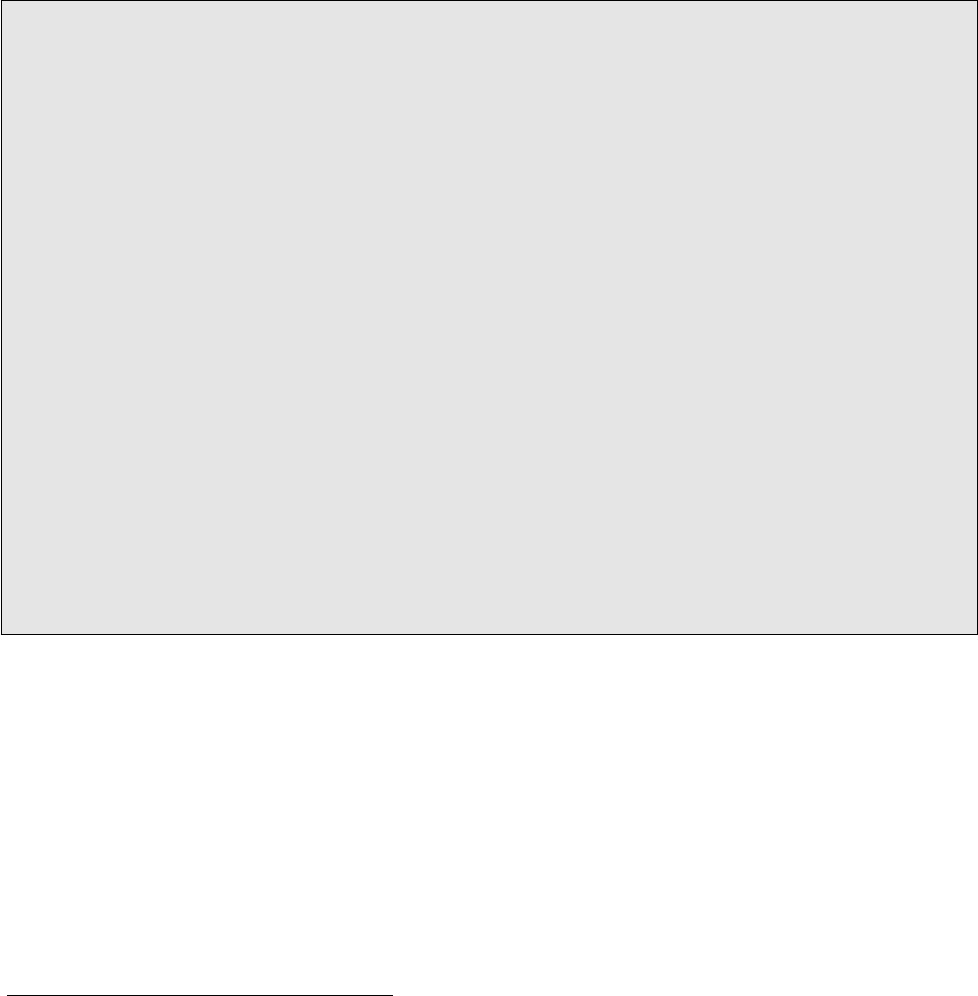
Packets with bomb. This example is described by Kushmerick, Hanks, and Weld (1995).
In ”packets with bomb“ domain [16], a robot is given several packages pi, and told that some
of them may contain bombs bi. Robot’s goal is to defuse the bomb, and the only way to do so
is to dunk the package containing the bomb in the toilet. Placing a package in the toilet might
clog the toilet. The robot can sense if a bomb is within a packet by using the observation action
senseIN (see listing 12.2). Action dunk can be executed if the toilet is not clog or stuck. Note
the conditional effect (defused ?b) takes place only when the bomb is in the package (in
?p ?b). Important here is the nondeterministic effect (stuck ?t), signaled by the keyword
nondet.
Without preconditions, action flash can be executed at each time instance with the certain
effect of unclog the toilet (not (clog ?t)). Action unstick can also be executed anytime,
but its effect is conditioned by the state variable (stuck ?toilet).
Listing 12.2: Packets and bomb domain with sensing actions.
1 ( define (domain btnd )
2 ( : types package bomb t o i l e t )
3 ( : predicates
4 ( in ?p − package ?b − bomb)
5 ( d e f us e d ?b − bomb)
6 ( c l o g ? t o i l e t − t o i l e t )
7 ( s t uc k ? t o i l e t − t o i l e t ) )
8
9 ( : action s ens eIN
10 : parameters ( ? p − package ?b − bomb)
11 : o bs e r ve ( in ?p ?b ) )
12
13 ( : action dunk
14 : parameters ( ? p − package ?b − bomb ? t − t o i l e t )
15 : precondition (and ( not ( c l o g ? t )) ( not ( st uc k ? t ) ) )
16 : e f f e c t (and (when ( in ?p ?b ) ( de f us e d ?b ) )
17 ( c l o g ? t )
18 ( nondet ( stu c k ? t ) ) ) )
19
20 ( : action f l u s h
21 : parameters (? t − t o i l e t )
22 : e f f e c t ( not ( cl o g ? t ) ) )
23
24 ( : action u n s t ic k
25 : parameters (? t o i l e t − t o i l e t )
26 : e f f e c t (and (when ( s tuc k ? t o i l e t ) ( not ( st u ck ? t o i l e t ) ) ) ) ) )
To solve problems such as those formalised in listings 12.1 and 12.2, we need tools able to
do conformant planning and contingent planning.
12.2 Conformant planning
Differently for classical planning, conformant planning deals with uncertainty in the initial
state. Moreover, actions can be nondeterministic. A solution is a plan that is guaranteed to
take us from any initial state to some goal state, no matter what the effect of actions is.
We will use the FF-conformant planner
1
. [13] describes the mechanism of the FF-conformant
planner as follows: First, enforced hill-climbing (EHC) is tried. The current search state s is
set to the initial state. While s 6= goal:
1
Available at https://fai.cs.uni-saarland.de/hoffmann/cff.html
90

1. Perform breadth-first search starting from s such that h(s
0
) < h(s). During search: avoid
repeated states; cut out states s
0
with h(s
0
) = ∞; and expand only the successors of s
0
generated by the actions in H(s). H(s) is the set of helpful actions to state s, that are
those actions that could be selected to start the relaxed plan.
2. If ¬∃s
0
with h(s
0
) < h(s) then fail, else s := s
0
.
Second, if EHC fails, apply complete best-first search by expanding all states in order of in-
creasing h value. Here, h(s) is the number of actions in a relaxed plan to the goal state. The
PDDL representation is translated into CNF, hence a satisfiability solver (such as Chaff [19] or
DPLL) is used.
The planner gets the operator file (that is the domain) and the fact file, (that is the planning
task. An example of calling the planner is:
1 . / Conf−FF −o c f f −t e s t s / bl o ck s /domain . pddl −f c f f −t e s t s / bl o ck s /p1 . pddl
Exercise 12.1 Run the examples provided in the cff-tests directory.
12.3 Contingent planning
Contingent planning generates conditional plans under uncertainty about the initial state and
action effects, but with the ability to observe some aspects of current state. Hence,
contingent planning = conformant planning + observations (12.1)
In the non-deterministic blocks world, we have uncertainty about the initial arrangement
of the top n blocks on each stack, and one must observe the block positions before proceeding.
In the non-deterministic bomb domain, flushing a package non-deterministically deletes a new
fact (unstuck(toilet)) that then must be re-achieved.
We will use Contingent-FF planner
2
. Contingent-FF adds observations and uncertainty to
sequential STRIPS with conditional effects [12].
Observation actions. Beside the normal actions, there are now special observation actions
(see listing 12.3). Each observation action splits the belief state and introduces two branches
into the plan: one for the positive effect and one for the negative effect.
Listing 12.3: Sensing actions in the blocks domain.
1 ( : action senseON
2 : parameters ( ? b1 ?b2 )
3 : obs e r ve ( on ?b1 ?b2 ) )
4
5 ( : action senseCLEAR
6 : parameters ( ? b1 )
7 : obs e r ve ( c l e a r ?b1 ) )
Exercise 12.2 Following the model in listing 12.3, define the sensing action senseOnTable
used to observe if a block is on table.
In listing 12.4 what is known is that block b1 is on table and nothing is on b2. We don’t
know if b2 is on table, if b1 is clear and if b2 is on b1. What we do know is either b1 is clear
or b2 is on b1.
2
Available at https://fai.cs.uni-saarland.de/hoffmann/cff.html
91

Listing 12.4: Conformant task in the blocks domain.
1 ( define ( problem BW−2)
2 ( : domain b l o cks w o r l d )
3 ( : objects b1 b2 )
4 ( : i n i t
5 ( on−t a b l e b1 )
6 ( c l e a r b2 )
7 ( unknown ( on−t a b l e b2 ) )
8 ( unknown ( c l e a r b1 ) )
9 ( unknown ( on b2 b1 ) )
10 ( o n eo f ( c l e a r b1 ) ( on b2 b1 ) ) )
11 ( : goal (and ( on b1 b2 ) ) ) )
The planner gets the operator file (that is the domain) and the fact file (that is the planning
task. An example of calling the planner is:
1 . / Contingent−FF −o c o n t f f −t e s t s / b l o c k s /domain . pddl −f c o n t f f −t e s t s / b lo c k s /p1 . pddl
The resulted plan has three layers (noted below with 0, 1 and 2) and four actions:
1 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
2 0 ||0 −−− SENSECLEAR B1 −−− TRUESON: 1 ||0 −−− FALSESON: 1 ||1
3 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
4 1 ||0 −−− MOVE−T−TO−B B1 B2 −−− SON: 2||−1
5 1 ||1 −−− MOVE−TO−T B2 B1 −−− SON: 2 ||0
6 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
7 2 ||0 −−− MOVE−T−TO−B B1 B2 −−− SON: 3||−1
8 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
The plan is more clear presented in the following diagram:
(senseCLEAR b1)
(move-t-to-b b1 b2) (move-to-t b2 b1)
(move-t-to-b b1 b2)
Here, the left branch is the true son, while the right branch is the false son.
Exercise 12.3 Using Contingent-FF, can you find another plan?
Nondeterministic effects. Normal actions can have non-deterministic effects. FF-contingent
is limited to a single unconditional non-deterministic effect per action.
A problem for the “bomb and toilet“ nondeterministic domain (btnd) appears in listing 12.5.
There are two bombs, four packages and one toilet. We know that bomb b0 is in package p0.
We also know that b1 is in one of the remaining three packages p1, p2 or p3. Goal is to defuse
both bombs.
Listing 12.5: Nondeterministic bomb domain.
1 ( define ( problem btnd −4)
2 ( : domain btnd )
3 ( : objects
4 b0 b1 − bomb
5 p0 p1 p2 p3 − package
6 t0 − t o i l e t )
92

7 ( : i n i t
8 ( i n p0 b0 )
9 ( unknown ( in p1 b1 ) )
10 ( unknown ( in p2 b1 ) )
11 ( unknown ( in p3 b1 ) )
12 ( on e of ( in p1 b1 ) ( i n p2 b1 ) ( in p3 b1 ) ) )
13 ( : goal (and ( de f u se d b0 ) ( de f u se d b1 ) ) ) )
By running the Contingent-FF planner with the default settings:
1 . / Contingent−FF −o c o n t f f −t e s t s / b l o c k s /domain . pddl −f c o n t f f −t e s t s / b lo c k s /p1 . pddl
the plan in listing 12.6 is obtained.
Listing 12.6: A linear plan for the nondeterministic bomb domain.
1 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
2 0 ||0 −−− DUNK P3 B1 T0 −−− SON: 1 ||0
3 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
4 1 ||0 −−− FLUSH T0 −−− SON: 2 ||0
5 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
6 2 ||0 −−− UNSTICK T0 −−− SON: 3 ||0
7 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
8 3 ||0 −−− DUNK P0 B0 T0 −−− SON: 4 ||0
9 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
10 4 ||0 −−− UNSTICK T0 −−− SON: 5 ||0
11 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
12 5 ||0 −−− FLUSH T0 −−− SON: 6 ||0
13 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
14 6 ||0 −−− DUNK P2 B1 T0 −−− SON: 7 ||0
15 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
16 7 ||0 −−− UNSTICK T0 −−− SON: 8 ||0
17 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
18 8 ||0 −−− FLUSH T0 −−− SON: 9 ||0
19 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
20 9 ||0 −−− DUNK P1 B1 T0 −−− SON: 10||−1
21 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Cost of the plan is given by the number of layers (10) and number of actions (10). That is, the
plan is linear with no sensing actions.
Exercise 12.4 Using Contingent-FF, can you find better plan? Does the plan include obser-
vation actions? Is it the optimal plan?
Exercise 12.5 Run the examples provided in the contff-tests directory.
Exercise 12.6 Solve the planning task described in section 11.2 AIMA, third edition.
93

12.4 Solution to exercises
Solution to exercise 12.2.
(:action senseONTABLE
:parameters (?b1)
:observe (on-table ?b1))
Solution to exercise 12.3
Searching with AO* instead of Greedy AO* with
./Contingent-FF -o contff-tests/blocks/domain.pddl
-f contff-tests/blocks/p1.pddl
-a 0
the following plan was found:
(senseON b2 b1)
(move-to-t b2 b1)
(move-t-to-b b1 b2)
(move-t-to-b b1 b2)
Here, the left branch is the true son, while the left branch of the false son.
Solution to exercise 12.4.
With:
./Contingent-FF -o contff-tests/btnd/domain.pddl
-f contff-tests/btnd/p4.pddl
-a 0 -w 3
you obtain:
-————————————————
0——0 — DUNK P0 B0 T0 — SON: 1——0
————————————————-
1——0 — UNSTICK T0 — SON: 2——0
————————————————-
2——0 — FLUSH T0 — SON: 3——0
————————————————-
3——0 — SENSEIN P1 B1 — TRUESON: 4——0 — FALSESON: 4——1
————————————————-
4——0 — DUNK P1 B1 T0 — SON: 5——-1
4——1 — DUNK P3 B1 T0 — SON: 5——0
————————————————-
5——0 — UNSTICK T0 — SON: 6——0
————————————————-
6——0 — FLUSH T0 — SON: 7——0
————————————————-
7——0 — DUNK P2 B1 T0 — SON: 8——-1
————————————————
As the number of layers is 8 and number of actions 9, this plan is better. Note the SensoOn
observation action. Given the size of the problem, try to find by hand the optimal plan.
94

Chapter 13
Knowledge representation with event
calculus
The commonsense knowledge about the effects of events on fluents is modelled with event
calculus.
Learning objectives for this week are:
1. To see the structure of a DECReasoner input corresponding to a domain description.
2. To perform reasoning tasks in event calculus: prediction, abduction, postdiction.
3. To understand and describe common sense reasoning in event calculus.
13.1 Discrete Event Calculus reasoner
We will use the Discrete Event Calculus Reasoner (DECReasoner)
1
. The tool supports vari-
ous types of reasoning: deduction, temporal projection, abduction, planning, postdiction, and
model finding [20]. DECReasoner translates the domain into a satisfiability (SAT) problem.
The SAT solver that we will use is Relsat
2
. Relsat [3] is already compiled for you in the solvers
directory.
Basic notions of event calculus are events and fluents. An event e is an action that may
occur in the world, such as a robot picking an object. An event may occur or happen at a time
instance. A fluent f is a property of the world that is varies in time, such as the location of the
robot. The commonsense knowledge about the effects of events on fluents is modelled with the
following predicates: HoldsAt(f, t), Happens(e, t), Initiates(e, f, t), Terminates(e,
f, t). For the Semantics of these predicates consult [23] or [21].
Test the DECReasoner with:
1 cd d e c r ea so ne r
2 python
3 >>> import d e c r ea so ne r
4 >>> d e c r e a s o n e r . t e s t ( )
The model shows the fluents that are true at timestep zero. For the following timesteps,
fluents that become true are signaled with (“+”), and fluents that become false with (“-”). To
show all fluents that are true or false at each timestep, you need to add the following line in
1
Available at http://decreasoner.sourceforge.net
2
The diligent student should recall that Mace4 is also a SAT solver.
95

the input file: option timediff off. Variables start with lowercase letters, constants with
uppercase letters.
13.2 Reasoning modes in event calculus
There are three reasoning modes for event calculus: prediction, abduction and postdiction.
Prediction
For prediction (or temporal projection) we start with an initial state and some events and then
reason about the state that results from the events.
1 agen t Nathan
2 f l u e n t Awake( agent )
3 e vent WakeUp( agent )
4 e vent F al l A s l e ep ( agent )
5
6 I n i t i a t e s (WakeUp( agent ) , Awake( a gent ) , time ) .
7 Terminates ( F a l lA s l e e p ( ag ent ) , Awake ( agent ) , time )
8
9 ! HoldsAt ( Awake ( Nathan ) , 0 ) .
10
11 Happens (WakeUp( Nathan ) , 1 ) .
12
13 c om pl et io n Happens
14
15 range time 0 3
16 range o f f s e t 1 1
In listing 13.2, Nathan is not awake at timestep 0. The event WakeUp happens at timestep
1. Based on this narrative, the reasoner can infer that Nathan is awake at timestep 2, given
by HoldsAt(Awake(Nathan),2). Based on the common law of inertia, Nathan will be also
awake at time step 3. Note that the reasoning is limited to the time interval 0 to 3, specified
withrange time 0 3.
1 1 model
2 −−−
3 model 1 :
4 0
5 1
6 Happens (WakeUp( Nathan ) , 1 ) .
7 2
8 +Awake( Nathan ) .
9 3
Planning in event calculus
For abduction (or adductive planning), we start with an initial state and a final state and then
reason about the events that lead from the initial state to the final state
1 >>> d e c r e a s o n e r . run ( ’ examples / Mueller2 006 / Chapter2 / Slee p 2 . e ’ )
1 agen t Nathan
2 f l u e n t Awake( agent )
3 e vent WakeUp( agent )
4 e vent F al l A s l e ep ( agent )
96

5
6 I n i t i a t e s (WakeUp( agent ) , Awake( a gent ) , time ) .
7 Terminates ( F a l lA s l e e p ( ag ent ) , Awake ( agent ) , time )
8
9 ! HoldsAt ( Awake ( Nathan ) , 0 ) .
10 HoldsAt (Awake ( Nathan ) , 1 ) .
The reasoner infers that the action Happens(WakeUp(Nathan),0) should be executed. This
is the only action that leads the agent from the init state !HoldsAt(Awake(Nathan),0) to the
goal state HoldsAt(Awake(Nathan),1).
You can test this by loading the file Sleep2.e:
1 >>> d e c r e a s o n e r . run ( ’ examples / Mueller2 006 / Chapter2 / Slee p 2 . e ’ )
Note that a STRIPS operator can be translated into the language of event calculus. The
action op below
1 ( : action op
2 ( : precondition : (and c1 c2 )
3 ( : e f f e c t : (and p1
4 p2
5 (not n1 )
6 (not n2 ) ) ) )
is similar to the following set of event calculus formulas:
c1 & c2 ⇒ Terminates(op, n1, t)
c1 & c2 ⇒ Terminates(op, ni, t)
c1 & c2 ⇒ Initiates(op, p1, t)
c1 & c2 ⇒ Initiates(op, pi, t)
Postdiction
We start with some events that lead to a state and then reason about the state prior to the
events.
1 >>> d e c r e a s o n e r . run ( ’ examples / Mueller2 006 / Chapter2 / Slee p 3 . e ’ )
Exercise 13.1 Run and analyse the prediction reasoning task from the monkey and banana
scenario in the example/GiunchigliaEtAl2004. The scenario is described in [7].
13.3 Carying a newspaper example
This example is introduced in [21].
Example 1 In the living room, Lisa picked up a newspaper and walked into the kitchen. Where
did the newspaper end up? (It ended up in the kitchen.)
1 o b j e c t Newspaper
2 agen t L i s a
3 room LivingRoom , Kitchen
4
5 e vent LetGoOf ( agent , o b j e c t )
6 e vent PickUp ( agent , o b j e c t )
7 e vent Walk( agent , room , room )
8
97
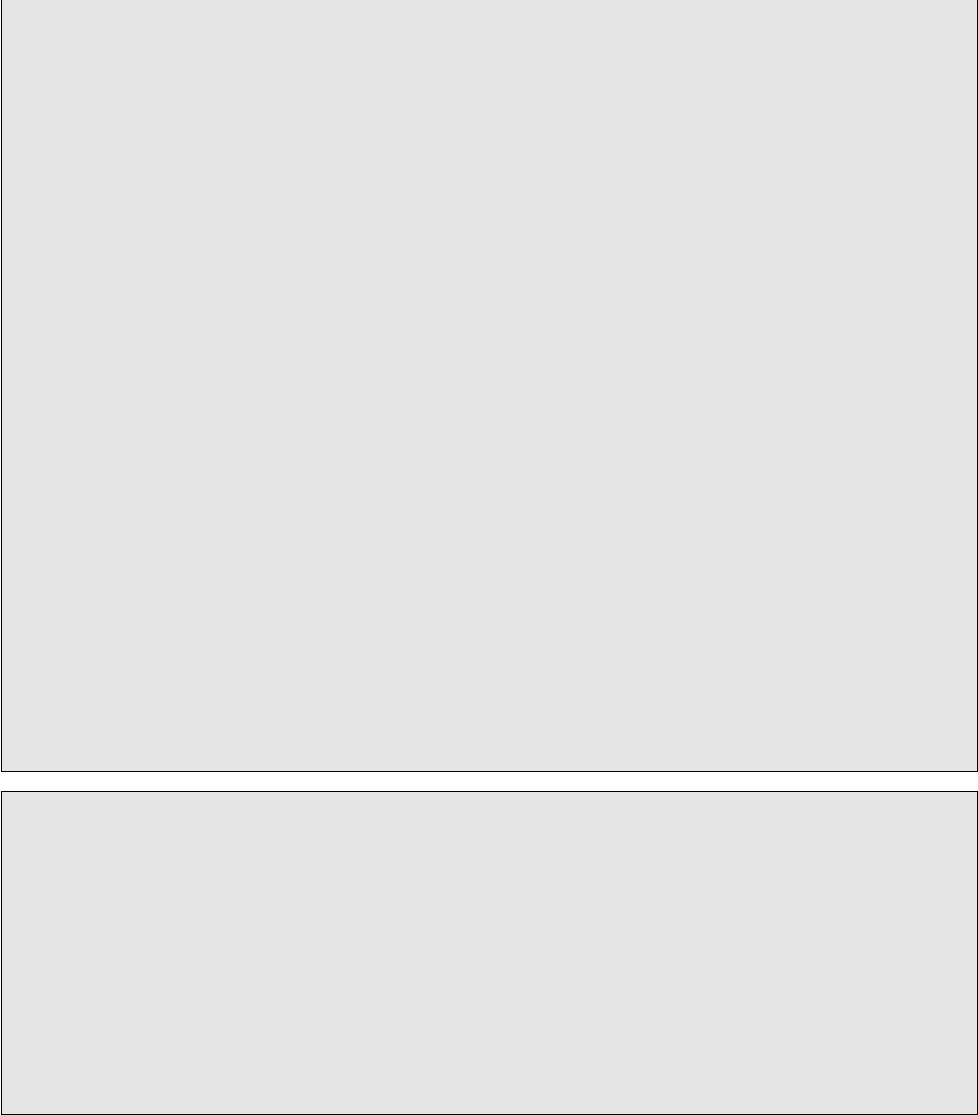
9 f l u e n t InRoom( o bj e c t , room )
10 f l u e n t Holding ( agent , o b j e c t )
11
12 I n i t i a t e s (Walk ( agent , room1 , room2 ) , InRoom ( agent , room2 ) , time )
13
14 room1 \neq room2 −> Terminates (Walk ( agent , room1 , room2 ) , InRoom ( agent , room1 ) , time )
15
16 HoldsAt ( InRoom ( agent , room ) , time )
17 HoldsAt ( InRoom ( ob j e c t , room ) , time ) −>
18 I n i t i a t e s ( PickUp ( agent , o b j e c t ) , Holding ( agent , o b j e c t ) , time )
19
20 HoldsAt ( Holding ( agent , o b j e c t ) , time ) −>
21 Terminates ( LetGoOf ( agent , o b j e c t ) , Holding ( agent , o b j e c t ) , time )
22
23 HoldsAt ( Holding ( agent , o b j e c t ) , time ) −>
24 I n i t i a t e s (Walk ( agent , room1 , room2 ) , InRoom ( ob j e c t , room2 ) , time )
25
26 HoldsAt ( Holding ( agent , o b j e c t ) , time ) & room1 \neq room2 −>
27 Terminates ( Walk ( agent , room1 , room2 ) , InRoom( o b je c t , room1 ) , time )
28
29
30 HoldsAt ( InRoom ( ob j e c t , room1 ) , time ) &
31 HoldsAt ( InRoom ( ob j e c t , room2 ) , time ) −> room1=room2
32
33 Happens ( PickUp ( Lisa , Newspaper ) , 0 )
34
35 Happens (Walk( Lisa , LivingRoom , Kitchen ) , 1 )
36
37 HoldsAt ( InRoom ( Lisa , LivingRoom ) , 0 )
38 HoldsAt ( InRoom ( Newspaper , LivingRoom ) , 0 )
39 \neg HoldsAt ( Holding ( Lisa , Newspaper ) , 0 )
40 \neg HoldsAt ( Holding ( agent , agent ) , time )
1 Model 1 :
2 0
3 InRoom( Newspaper , LivingRoom ) .
4 InRoom( Lisa , LivingRoom ) .
5 Happens ( PickUp ( Lisa , Newspaper ) , 0 ) .
6 1
7 +Holding ( Lisa , Newspaper ) .
8 Happens (Walk( Lisa , LivingRoom , Kitchen ) , 1 ) .
9 2
10 −InRoom ( Newspaper , LivingRoom ) .
11 −InRoom ( Lisa , LivingRoom ) .
12 +InRoom ( Newspaper , Kitchen ) .
13 +InRoom ( Li sa , Kitchen ) .
98
13.4 Solutions to exercises
Solution for exercise 13.1.
decreasoner.run(’examples/GiunchigliaEtAl2004/MonkeyPrediction.e’)
decreasoner.run(’examples/GiunchigliaEtAl2004/MonkeyPlanning.e’)
The reasoner computes the following plan:
Happens(Walk(L3), 0).
Happens(PushBox(L2), 1).
Happens(ClimbOn(), 2).
Happens(GraspBananas(), 3).
decreasoner.run(’examples/GiunchigliaEtAl2004/MonkeyPostdiction.e’)
99
Appendix A
Brief synopsis of Linux
Here you have some basic, useful Linux commands. This synopsis is not meant to be exhaustive
or to always offer the best way to achive one goal. It is rather intended to help a beginner use
a Linux system and get a quick start in running the lab applications. The synopsis is mainly
concerned with the Fedora distribution (the one which is used in the lab). Unless otherwise
specified, the commands are to be typed at a terminal prompt. The argument(s) required
should be obvious once you look at the example provided and at its description.
How to begin and end a work session
In the login screen, you should enter: you username (aka login name or account name or simply
user) and your password, as provided by the administrator. Henceforthh, the username will be
iia.
login: iia
password: < −− Please continue typing even if no echo is shown!
Typically, your current directory will be /home/iia (we’ll call this your home directory).
If you open a terminal, you will ”arrive” in that directory. The home directory is denoted by
~ (the tilde character). Most of the time it is here that you find a file which has been copied
from a remote computer (e.g., a file copied to you machine by your teacher), unless otherwise
specified by the person who did this (and most of the time your teacher will not bother to
specify a different destination).
To quit your session, search for System -> Logout in the upper right corner of the graphical
interface.
Shut down a system: poweroff
Alternatively to typing poweroff at the prompt, you may use System -> Shut down, also
available from the upper right corner of the graphical interface.
Pay attention! Before shutting down a computer, always do:
who
in a terminal, in order to see whether some other users are connected to your computer
(don’t forget Linux is actually a multiuser operating system – more users can work on the same
machine in the same time and share its resources. See more details in Section A).
Help for a command: man
Example:
100
man ls
shows a help for the command ls (list all files in a folder/directory).
Get the IP address of your computer: ifconfig
Your LAN interface is typically called eth0. The IP address consists of 4 dot-separated numbers,
e.g., 192.168.1.3
Connecting to another computer via secure shell: ssh
Example: If you are working on computer c1 and want to connect to computer c2, in the iia
account, you should do on c1:
ssh -X iia@c2
then type the password of iia on computer c2 (even if you see no echo when typing).
Here, c2 is either the name or the IP address of the remote computer. You will get acces to a
terminal on c2 and be able to run programs there, including GUI featuring programs (due to
the X option).
To close (i.e. end) the connection, just type in the remote terminal:
exit
Copy files on some other computer via secure copy: scp
Example: if you want to copy file f1 from computer c1 to destination computer c2, into account
iia, open a terminal on c1, change directory (see Section A) to the one containing f1 and type:
scp f1 iia@c2: < −− Please note the colon at the end!
then type the password of iia on computer c2. f1 is copied on computer c2, in /home/iia.
Directories and files
The directory system has a unique root called / (similar to C: in Windows). File names are
Case Sensitive. Files have no specific extensions; a dot “.” might be a part of the file name
(a file could be named f, f.c or even f.1.2.3.c).
Change current directory: cd
Example: change directory to /home/iia/john:
cd /home/iia/john
Example: change directory to the parent of the current directory:
cd ..
Example: change directory to your home directory:
cd ~
or simply
cd
Print working directory (the name of the current directory): pwd
The command pwd prints the complete name of the current directory. Alternatively, you can
do echo $PWD (see also Section A).
101

Paths to files
Let us assume that the current directory is /home/iia and we create here a folder called d1,
then, inside d1, a file called f1.txt. We can reffer to the file f1.txt either as d1/f1.txt
(we will say we use the ”relative path”) or as /home/iia/d1/f1.txt (in this case, we use the
”absolute path”). If we type ./d1/f1.txt, we also use a relative path as a dot means ”the
current directory”, which is, for now, /home/iia .
If we now change directory to d1, we can reffer to f1.txt as simply f1.txt or as ./f1.txt
(as you have probably noticed, the current directory is now /home/iia/d1), or even as /home/iia/d1/f1.txt.
Please note the absolute path remains the same, while the relative path (not surprisingly)
changes.
Here, by ”path” we mean the name of a file preceded by the names of the directories
containing it.
Symbolic Links: ln -s
This command creates a symbolic link (like a Windows shortcut: an alternative name for a
file). It’s usually used in order to give a ”constant” name to a file whose ”true” name changes
over time (e.g., a library, whose name includes the version number). Example:
ln -s /usr/local/lib/myjar.0.1.23.jar myjar.jar
Archives: tar (or via GUI)
To create a compressed archive called archive name.tar.gz, you should do:
tar zcvf archive name.tar.gz f1 f2 d1
where f1, f2, d1 are either files or directories to be added to the archive. When adding a
directory to an archive its whole structure is preserved.
You can do the same job via a graphical interface, by right clicking on the file.
To decompress and extract files from an archive, you may use:
tar zxvf archive name.tar.gz
Midnight Commander (a Total Commander-like tool): mc
The mc command starts a tool which allows you to create, copy, delete files or directories by
using the Functional Keys. One can see their functionalities at the bottom of the panels (e.g.,
F7 allows creating a new directory).
Environment variables
They contain data which is important for the whole system. Examples:
• PATH contains the name of directories, separated by colons, in which a file launched into
execution is to be searched
• CLASSPATH tells Java applications and JDK tools where to search for classes
• PWD gives the present working directory
The env command shows all environment variables and their values.
102

Setting: use export
You need to type:
VARIABLE=value
export VARIABLE
or:
export VARIABLE=value
Example:
export PATH=$PATH:/home/iia/d1
says the new value of PATH will be its old value ($PATH), to which we append (via : ) the
value /home/iia/d1
Example:
export PATH=$PATH:.
appends the value . (i.e., the ”current directory”) to PATH ; as you remember, one could
always reffer to the current directory by using the character . (a dot).
Let us assume now the current directory is /home/iia and we create here a folder called d2
and a file called f1.sh in d2, then we set the execution rights to f1.sh as explained in Section
A. In order to run f1.sh, we have the following options:
1. using the absolute path: /home/iia/d2/f1.sh
2. using the relative path: ./d2/f1.sh or simply d2/f1.sh
3. if the directory containing f1.sh (i.e., /home/iia/d2) has been added to PATH, you can
just type f1.sh and this will work no matter which your current directory is
4. change directory to d2 and type ./f1.sh
5. provided you have changed directory to d2, you can do a f1.sh but this only works if the
current directory, denoted in Linux by a dot, has been added to the PATH. If this is not
the case and the directory containing f1.sh has not been added to the PATH either, then
simply typing f1.sh WILL NOT WORK and will return a command not found error.
Let us assume the dot is in the PATH, but no other directories have been added there, and
you have a file called f1.sh in directory d1 and a file also called f1.sh in directory d2. If
you type just f1.sh, you will be able to run f1.sh, but the version to be run depends on
your current directory. So, if you do cd /home/iia/d1 then f1.sh, you will actually run
/home/iia/d1/f1.sh. But if you do cd /home/iia/d2 then f1.sh, you will actually run
/home/iia/d2/f1.sh.
The command export PATH=$PATH:. in the example above basicly tells that, if the user
tries to run file x by typing x at the prompt, the shell must search x in the directory where the
command x has been issued, besides the other directories in the PATH.
To find out the absolute path to a program progr which is run, type:
which progr
Displaying: echo $VARIABLE NAME
If we want to see which is the current value of a specific environment variable, we may use:
echo $VARIABLE NAME
Example:
echo $PATH
103

Automatic Setting
If you want directory /home/iia/d1 to be added to your PATH automatically each time you log
in, please make sure the following lines are added to the file /home/iia/.bash profile:
PATH=$PATH:/home/iia/d1
export PATH
(alternatively, you can use the file .bashrc in your home directory).
USB memory stick
Usually, when the stick is introduced into the computer, it gets automatically mounted on the
file system. This means it temporarily becomes integrated into and visible as a part of the file
system. From a terminal, you may access it in /run/media/iia/THE NAME OF YOUR STICK/. If
a writting operation has been conducted over a file on the stick (like writting, modifying or
deleting a file), then, before removing the stick from the computer, you must unmount (eject)
it. A right click on the stick’s icon will guide you.
Rights over files
Rights and types of users
In Linux, users of a file are divided into three categories: file owner, denoted by u; file owner
group g; others o. The rights a user may have over a file are r, w and x meaning the right to
read, write (i.e., modify) and execute (i.e., run) the file. A file that could be executed is either
a binary file (for example, the result of compiling and linking a C source), or a text file, aka
script, containing operating system commands (e.g., the PATH setting command above).
As an example: if you want to run a binary file or a script, you need to make sure its
execution right is set. Otherwise you will get an error message (e.g., Permission denied),
signaling that you have no permission to run that file.
Displaying rights: ls -l
Example:
ls -l f1
returns:
-rwxr-xr-- 1 iia students 32212 Oct 22 13:46 f1
The first column of the result contains 9 letters showing the rights over file f1 of its owner
(rwx) – so iia can read, write and execute the file, group members (r-x) – the members of the
students group can read and execute the file, but can’t modify it; the other users (r--) can
only read it.
Changing rights: chmod
Example:
chmod ug+r file1
grants the owner (user u) and her group (g) the right ot read (r) the file file1 (if the user
who launches this command has the right to grant them).
Revoking the right of writting the file for everyone (user, group members and the others )is
done by either of the following two commands:
chmod a-w file1
104

chmod -R a-w dir1
The latter recursively changes the rights over the files and directories in dir1, at every
nesting level.
Changing file owner and group: chown and chgrp
Example: to make iia the new owner of file1, do:
chown iia file1
Example: to change group for file1 into students, do:
chgrp students file1
Seek for a file: locate or find
Example: locate passwd
returns the full path to all files in the system whose name includes the string ”passwd”.
It actually looks in a system database which stores data about files, so it might not produce
up-to-date results, depending on the moment the database update has been done.
Example: find /home -name "passwd" -print
searches recursively in the file system, starting from /home, the files called passwd.
Search for a string inside a file: grep
Example:
grep abc file1
displays every line in file1 containing the string abc. The string could actually be a
regular expression (grep actually stands for ”get regular expression pattern”), e.g., f*.txt
which means ”all strings starting with f and ending in .txt”.
Editing files: mcedit, gedit, kile
mcedit file name
(or F4 on the file in Midnight Commander). mcedit heavily relies on Function keys. One
can see their functionalities at the bottom of the panels (e.g., F7 does a search of a word in the
file).
Some other options are:
gedit file name
xemacs file name
For productively writing texts using L
A
T
E
X, a very good Integrated Environment is kile.
Redirecting commands: >, >> and <
The result of a command can be sent into a file instead of being displyed on the screen. This
is done by > dest, if you want the original dest file to be erased, or >> dest if you need it to
be appended.
Example:
ls -l > all.txt
creates a detailed list with all files in the current directory which will be written in the file
all.txt.
105
Similarly, one can instruct the system to read from a file f.in instead of the keyboard (to
redirect the input). This is done by using < f.in (e.g., go < f.in makes go read from f.in).
Pipes: |
More programs could be pipelined such that the output of one is used as the input for the next;
the operator used is |.
Example:
ls -l | grep *.c
produces a list of all files in a directory (ls -l); this list will be the input for grep *.c,
which searches for all files whose name end in .c.
Compiling and running programs
C programs: gcc and make
For .c programs, just do:
gcc
Example: let us assume we have in the file hw.c the following C code:
#include<stdio.h>
void main() {
printf("Hello, world!\n");
}
you may compile it from command line like this:
gcc hello.c -o hello.exe
This will produce the output hello.exe, which can be run by typing ./hello.exe
For bigger projects, the following command usually helps:
make
It assumes there is a file called Makefile or makefile in the current directory; this file
contains the commands to be actually launched for compiling the sources.
Quite often, projects could be compiled and installed using the following procedure:
./configure
make
make install
where the last line should be run with root priviledges.
Java programs: javac, java and ant
A Java program could be compiled using:
javac
Example: if we have the following code in the file HelloWorld.java:
public class HelloWorld {
public static void main(String[] args) {
System.out.println("Hello, World!");
106

}
}
we can compile it with:
javac HelloWorld.java
which will produce the file HelloWorld.class.
Running the program needs launching the Java Virtual Machine, which is done by:
java
In order to run the example above, we can do:
java HelloWorld
If all we have is a jar file, e.g., hw.jar, we can type:
java -jar hw.jar
A program which does for a Java project pretty much the same job as make for C projects
is ant.
Processes on the system
Listing processes and their status: ps
Example:
ps -ef
could return something like:
...
iia 5712 2692 0 22:54 ? 00:00:00 kdeinit4: kio_file [kdein e
root 5713 2 0 22:55 ? 00:00:00 [kworker/2:2]
iia 5752 2481 0 22:57 pts/0 00:00:00 ps -ef
...
showing each program running on your system, together with its ”process identifier”, or
pid, which is a unique number attached to each process, as seen in column 2.
Forcibly stopping a process: kill
kill -9 pid
where pid is the unique number of the process you want to stop, as returned by ps.
Display a .pdf file from a terminal: okular or evince
Portable Document Format (.pdf):
okular file name.pdf &
or
evince file name.pdf&
Browsers: firefox or google-chrome
Mozilla Firefox, Google Chrome etc. could be launched via the GUI or from a command line,
e.g., by typing google-chrome& in a terminal.
107
MS Office-like packages: LibreOffice or Apache OpenOffice
LibreOffice and Apache OpenOffice are two alternatives for MS Office. Corresponding to Word,
Excel and PowerPoint, you have Writer, Calc and Impress.
108
Appendix B
L
A
T
E
X– let’s roll!
We will present how to write a .tex file and how to generate a .pdf from it. This includes
writting text, equations, tables, algorithms and handling references. You need little more than
one hour to understand the basics of L
A
T
E
X and one life to master it :)
Introduction
You should look in the .tex file (which is just a text file containing your text plus some
formatting macros) as well as in the .pdf file generated from it. You will see plain content and
some macros. A macro always starts with a backslash. For example, the macro \section{...}
marks the beginning of a document section (of course, you should replace the dots with the
section’s actual name).
The comments are introduced by the % sign and will help you understand the meaning of
the macros; the comment continues up to the end of line.
The commands needed for generating the .pdf are written in the file called Makefile; make
sure the variables in its first lines are properly set. Then, all you need to do is to type make
at the shell prompt. Alternatively, you can use L
A
T
E
X editors (see below) which provide the
compiling commands.
Some basics
First, Romanian letters: ˘a ˆı s
,
t
,
˘
A
ˆ
I S
,
T
,
ˆa
ˆ
A ¨u (even if the latter one does not seem to be
in Romanian). In order to write them properly (use a comma instead of a cedilla for s
,
),
you need to add \usepackage{combelow} to your document’s preamble. Or you can add
\usepackage[utf8x]{inputenc} to your document’s preamble, do a setxkbmap ro in a ter-
minal to change the keyboard layout to Romanian, then you can enter Romanian diacritics
using AltGr (e.g., AltGr+t).
We can use bullets:
• number one
• number two
Or we can use numbered items:
1. un (aka 1)
2. dos (aka 2)
109

To start a new paragraph, you just enter a blank line in the .tex file. The first paragraph
will have no indentation. This is normal; do not attempt to alter this.
Some characters, like $, &, %, #, , {, }, have special meanings in L
A
T
E
X; if you want to
escape them, place a backslash in front of them. In order to write a backslash in your .pdf,
put \backslash in your .tex file. To write < or >, you should enclose them between $ signs
($<$ and $>$ respectively).
When we cite a paper (e.g., paper [26] ), we take its bibtex reference from the web, store
it in the .bib file and label it there (e.g., gigel; this label must be unique in the .bib file).
Then use \cite{gigel} in the .tex file and let L
A
T
E
X handle ordering and cross-referencing.
Each time you use an idea, text etc. borrowed from some other author, you must properly cite
the source. It is a good time now to take a look in the .bib file and see how a bibtex entry of
an article looks like. Then, you may want to search the web for the bibtex of an article (e.g.,
search bibtex ”The Anatomy of a Large-Scale Hypertextual Web Search Engine”), grab it and
add it to the .bib file.
The rest of this paper is structured as follows. Section B describes the implementation
details, etc.
Implementation details
If we have algorithms used/modified/implemented/introduced, we can describe them. For
instance, algorithm 1. Describing algorithms requires studying the documentation of the
algorithmic and algorithm packages.
Algorithm 1: An algorithm looks like this
if Committed(G
1
, GR, α) then
BRT
α
= P redictBRT (G
1
, GR, α, C
GR
)
C
β
= ContextUpdate(C
β
, o)
end if
if utility ≥ CommunicationCost(G
2
) then
Int.T o(G
1
, Communicate(G
1
, G
2
, o))
end if
We can write equations:
S : a
m
∧ r
b
∧ d
B : d
c
∧ ((d
e
∧ ¬d
t
2
∧ d
t
15
) ∨ (¬d
e
∧ d
t
2
)
(B.1)
And big curly brackets:
b =
r
r+s+2
d =
s
r+s+2
u =
2
r+s+2
The notations for ”n choose k” and sum look like C
k
n
and
n
X
k=0
C
k
n
respectively.
Results
Tables
We summarize the results in a table, e.g., Table B.1. Typically, the table is placed on top of
the page where it is reffered for the first time, or on one of the consecutive pages. It is the
110

Table B.1: Multinomial opinion multiplication
belief atomicity
poor avg good poor avg good
success 0.1 0.2 0.3 0.4 0.5 0.6
failure 0.1 0.2 0.3 0.4 0.5 0.6
Figure B.1: Saying bye bye
L
A
T
E
X compiler decision.
Figures
We can also have figures, like Figure B.1. Some sources claim they tell 1000 words/figure.
Conclusions
Now we know how to write text, tables, references etc.
Acknowledgments
Special thanks to Knuth and Lamport for section B.
How to run the example
The v1.tex file contains the source; edit it with
kile v1.tex
To generate the .pdf file, type
make
And no, we don’t attempt to launch the Makefile. Just type make at the shell prompt and
enjoy.
Alternatively, you may press the QuickBuild button in the Kile editor.
111

Appendix C
Fast and furios tutorial on Python
Python supports multiple programming paradigms, including object-oriented, procedural and
functional styles.
• Proper indentation is a must. Blocks are represented with indentation, there is no need
to use curly braces.
• You don’t need to define the type of variables.
• You don’t need to add semicolon at the end of the statements.
• Python is case sensitive
• A minimum set of good practices are mentioned in C.1
There are two ways to run a python code:
• Interactively via an interpreter: $ python
• Execute a script - call from the command line: $ python your file.py
Main operators and built-in data types which you are going to use during the lab are
mentioned in tables C.2, C.3, C.4, AND C.5. For an exhaustive list, go to https://www.
tutorialspoint.com/python/index.htm or https://docs.python.org/2/tutorial/datastructures.
html
Running Python
1. Try basic operation in Python
(a) Invoke the interpreter in a terminal
$ python
(b) Try basic operators
Table C.1: Good practice
Variable, functions, methods, packages and modules lower case with underscores
Classes and exceptions CapW ords
Protected methods and internal functions single leading underscore(self, ...)
Constants ALL CAP S W IT H UNDERSCORE
112

Table C.2: Operators
Arithmetic +, −, ∗, /, %. ∗ ∗ ?2 ∗ ∗3
8
Comparison ==, ! =, <, >, >=, <=
Assignment =, + =, − =, ∗ = ... ?a = 2
?a, b = 2, “Hello
00
(multiple assignments)
Logical and or not
Table C.3: Data types
Numbers int, flat and complex classes
Strings marked with single quotes or double quotes
Lists [] on ordered sequence of items which do not need to be of the same type)
?a = [3,
0
an
0
, [3, 5]]
?a[0]
3
?a[−1]
[3, 5]
Tuples () an ordered sequence of items same as list; tuples once created cannot be modified
?a = (3,
0
an
0
,
0
10
0
)
Set {} on ordered collection of unique items
?a = {1, 2, 3, 0}
Dictionary an unordered collection of ke-value pairs
?d = {1 :
0
one
0
, 2 :
0
two
0
}
d[1] =
0
one
0
Observation: slicing operator [ ] works for string, lists and tuples.
Table C.4: Main operators on lists
len() Length ?len([1, 2,
0
3
0
])
3
Membership ?a = [1, 2]
in , not in ?1 in a
True
Concatenation: ?a, b = [1, 2], [3, 4, 5]
+ ?b + a
[3, 4, 5, 1, 2]
Negative indexing from back of the list: ?a = [1, 2, 3]
?a[−1]
3
Slice operator for adjacent elements ?a = [1, 2, 3, 4]
list[start, stop] ?a[1 : 3]
[ 2, 3 ]
113

Table C.5: Main methods on lists
Name Description Example
pop() Remove an elements from list ?a = [1,
0
a
0
,
0
three
0
]
?a.pop()
0
three
0
?a
[1,
0
a
0
]
reverse() Reverses items from list in place ?a = [
0
start
0
,
0
a
0
,
0
three
0
]
?a.reverse()
?a
[
0
three
0
,
0
a
0
,
0
start
0
]
sort() Sorts items from list in place ?a = [
0
start
0
,
0
a
0
,
0
three
0
]
?a.sort()
?a
[
0
a
0
,
0
start
0
,
0
three
0
]
count() Count of how many times obj occurs in list ?[1, 2, 3, 2].count(2)
2
index() The lowest index in list that obj appears ?[1, 2, 3, 2].index(2)
1
extend() Appends the contents of seq to list ?a = [1, 2, 3]
a.extend([4])
?a
[1, 2, 3, 4]
append() Appends object to list ?a = [1, 2, 3]
?a.extend([4])
?a
[1, 2, 3, [4]]
114
>>>1 + 3
4
>>> "IIA" == "iia"
False
>>> ’iia’ + ’ 3rd year’
’iia 3rd year’
>>> len(’iia’)
3
>>> s = ’iia’
>>> print s
>>> print "variable s has the value %s " % s
variable s has the value iia
>>> a,b = 2,5
>>> a+b
7
>>> (a,b) = (2, "iia")
>>> a
2
>>> b
’iia’
(c) Built-in data structures: test operators and methods listed in tableC.4
>>> roles = [’arya’, ’jon’, ’daenerys’, ’bran’]
>>> roles[1]
’jon’
>>> roles[-2]
’daenerys’
>>> roles[2:]
[’daenerys’, ’bran’]
>>> new_roles = [’cersei’, ’sansa’, ’tyrion’]
>>> roles + new_roles
[’arya’, ’jon’, ’daenerys’, ’bran’, ’cersei’, ’sansa’, ’tyrion’]
>>> roles
[’arya’, ’jon’, ’daenerys’, ’bran’]
>>> roles.append(new_roles)
>>> roles
[’arya’, ’jon’, ’daenerys’, ’bran’, [’cersei’, ’sansa’, ’tyrion’]]
>>> roles.remove(new_roles)
>>> roles
[’arya’, ’jon’, ’daenerys’, ’bran’]
>>> roles.extend(new_roles)
>>> roles
[’arya’, ’jon’, ’daenerys’, ’bran’, ’cersei’, ’sansa’, ’tyrion’]
>>> roles.pop()
’tyrion’
>>> roles
[’arya’, ’jon’, ’daenerys’, ’bran’, ’cersei’, ’sansa’]
>>>
Dictionaries
115

>>> actors = {’tyron’:"peter", "daenerys":"emilia", "jaime":"nikolaj"}
>>> actors["tyron"]
’peter’
>>> actors.keys()
[’daenerys’, ’tyron’, ’jaime’]
>>> actors.values()
[’emilia’, ’peter’, ’nikolaj’]
>>> actors.items()
[(’daenerys’, ’emilia’), (’tyron’, ’peter’), (’jaime’, ’nikolaj’)]
>>> actors.items()[1]
(’tyron’, ’peter’)
>>> dict = {"two:":2, "zero":0,"three":3}
>>> dict["four"] = 4
>>> dict
{’four’: 4, ’zero’: 0, ’two:’: 2, ’three’: 3}
>>> min(dict, key = dict.get)
’zero’
(d) Control structures
>>> a = [("a", 1), ("b", 2), ("c", 3)]
>>> for pair in a:
print "The pair is ", pair
(what, value) = pair
print "Elements of the pair are: ", what, " ", value
The pair is (’a’, 1)
Elements of the pair are: a 1
The pair is (’b’, 2)
Elements of the pair are: b 2
The pair is (’c’, 3)
Elements of the pair are: c 3
>>>if (1==1):
print "True"
else:
print "False"
Practice Python and autograder Your activity from the first 4 laboratories can be
auto-tested by using an autograder. It is possible to have more question for one exercise
and for each question there are more test cases. The original projects are taken from
http://ai.berkeley.edu/project_overview.html
Copy the files for tutorial autograder from https://s3-us-west-2.amazonaws.com/
cs188websitecontent/projects/release/tutorial/v1/001/tutorial.zip into your
folder. The folder tutorial contains more files from which you need to modifiy only the
files addition.py, buyLotsOfFruit.py and shopSmart.py.
(a) Run the autograder and observe the results before any change to the files
1 $python autograder .py
116

(b) Question 1 Change the function from addition.py such that it returns the addition
of the two parameters. Run again the autograder and check that at Question 1 you
get 1 point from 1.
(c) Question 2 Change the function buyLotsOfFruit in byLotsOfFruit.py such that
it returns the total cost of he order.
• Run
1 $python buyLotsOfFruit . py
• Run again the autograder and check that at Question 2 you get 1 out of 1 points.
(d) Question 3 Class shop.py describes the main methods for accessing the cost per
pound for a fruit and the price of the entire order (similar to teh previous question,
but in an object oriented manner). There are more Fruit Shops and all items of an
order must be bought from the same shop.
Change the function shopSmart from shopSmart.py such that it returns the Fruit-
Shop where the order costs the least amount. Don’t change shop.py.
Run
1 $python shopSmart . py
Run again the autograder and check that at Question 3 you get 1 out of 1 points.
117
Bibliography
[1] Masataro Asai and Alex S Fukunaga. Tiebreaking strategies for A* search: How to explore
the final frontier. In AAAI, pages 673–679, 2016.
[2] Roman Bartak. Constraint propagation and backtracking-based search. Charles Univer-
sit¨at, Prague, 2005.
[3] Roberto J Bayardo Jr and Robert Schrag. Using CSP look-back techniques to solve real-
world SAT instances. In AAAI/IAAI, pages 203–208, 1997.
[4] Avrim L Blum and Merrick L Furst. Fast planning through planning graph analysis.
Artificial intelligence, 90(1):281–300, 1997.
[5] Amanda Coles, Andrew Coles, Angel Garc´ıa Olaya, Sergio Jim´enez, Carlos Linares L´opez,
Scott Sanner, and Sungwook Yoon. A survey of the seventh international planning com-
petition. AI Magazine, 33(1):83–88, 2012.
[6] Alfonso Gerevini and Derek Long. Plan constraints and preferences in PDDL3. The
Language of the Fifth International Planning Competition. Tech. Rep. Technical Report,
Department of Electronics for Automation, University of Brescia, Italy, 75, 2005.
[7] Enrico Giunchiglia, Joohyung Lee, Vladimir Lifschitz, Norman C. McCain, and Hudson
Turner. Nonmonotonic causal theories. Artificial Intelligence, 153:49–104, 2004.
[8] Malte Helmert. A planning heuristic based on causal graph analysis. In ICAPS, volume 4,
pages 161–170, 2004.
[9] Malte Helmert. The fast downward planning system. Journal of Artificial Intelligence
Research, 26:191–246, 2006.
[10] Malte Helmert and H´ector Geffner. Unifying the causal graph and additive heuristics. In
ICAPS, pages 140–147, 2008.
[11] J¨org Hoffmann. FF: The fast-forward planning system. AI magazine, 22(3):57, 2001.
[12] J¨org Hoffmann and Ronen Brafman. Contingent planning via heuristic forward search
with implicit belief states. In Proc. ICAPS, volume 2005, 2005.
[13] J¨org Hoffmann and Ronen I Brafman. Conformant planning via heuristic forward search:
A new approach. Artificial Intelligence, 170(6-7):507–541, 2006.
[14] Richard Howey, Derek Long, and Maria Fox. VAL: Automatic plan validation, continuous
effects and mixed initiative planning using PDDL. In Tools with Artificial Intelligence,
2004. ICTAI 2004. 16th IEEE International Conference on, pages 294–301. IEEE, 2004.
118

[15] Byron Knoll, Jacek Kisynski, Giuseppe Carenini, Cristina Conati, Alan Mackworth, and
David Poole. Aispace: Interactive tools for learning artificial intelligence. In Proc. AAAI
2008 AI Education Workshop, page 3, 2008.
[16] Nicholas Kushmerick, Steve Hanks, and Daniel S Weld. An algorithm for probabilistic
planning. Artificial Intelligence, 76(1):239–286, 1995.
[17] Gabriele R¨oger Malte Helmert. A Beginner’s Introduction to Heuristic Search Planning,
2015.
[18] W. McCune. Prover9 and Mace4. http://www.cs.unm.edu/~mccune/prover9/, 2005–
2010.
[19] Matthew W Moskewicz, Conor F Madigan, Ying Zhao, Lintao Zhang, and Sharad Malik.
Chaff: Engineering an efficient SAT solver. In Proceedings of the 38th annual Design
Automation Conference, pages 530–535. ACM, 2001.
[20] Erik T Mueller. Discrete event calculus reasoner documentation. Software documentation,
IBM Thomas J. Watson Research Center, PO Box, 704, 2008.
[21] Erik T Mueller. Commonsense reasoning: an event calculus based approach. Morgan
Kaufmann, 2014.
[22] Gheorghe P˘aun. Matematica? Un spectacol! Editura S¸tint¸ific˘a ¸si Enciclopedic˘a, 1988.
[23] Stuart J. Russell and Peter Norvig. Artificial Intelligence - A Modern Approach (3. inter-
nat. ed.). Pearson Education, 2010.
[24] Raymond M. Smullyan. The lady or the tiger? and other logic puzzles, including a math-
ematical novel that features Coders great discovery. Alfred Knopf, Inc., 1982.
[25] G. Sutcliffe. The TPTP Problem Library and Associated Infrastructure. From CNF to
TH0, TPTP v6.4.0. Journal of Automated Reasoning, 59(4):483–502, 2017.
[26] Chen Zhou, Liang-Tien Chia, and Bu-Sung Lee. DAML-QoS ontology for web services.
In ICWS ’04: Proceeding’s of the IEEE International Conference on Web Services, page
472, Washington, DC, USA, 2004. IEEE Computer Society.
Intelligent Systems Group
119
